




1 线控制动系统关键技术一制动力最优分配策略
1.1制动力最优分配策略
制动力分配策略步骤
Step1:计算整车总制动力和各车轮制动力大小
关键点1:找出制动踏板力与制动减速度之间的关系;
关键点2:找出制动力系数、地面制动力以及垂直载荷的关系
Step2:计算前后车轮的垂直载荷大小
关键点:汽车制动过程中会出现载荷转移现象,需找出载荷转移量大小;
Step3:计算前后车轮制动盘的夹紧力大小
关键点:找出汽车制动时单个车轮制动力和制动器制动力矩间的关系
Step4:基于控制算法的制动压力调节
关键点:通过合适的控制算法对制动力大小进行微调
1.2制动力最优分配策略
由传统液压制动系统踏板位移、踏板力与制动压力之间存在的关系可以反推EMB系统踏板力与制动减速度之间的关系,建立关系曲线图。
踏板力与制动减速度之间的关系
要研究制动力分配策略,首先要识别驾驶员的制动意图,根据制动意 图才能确定驾驶员期望的制动力,这里面涉及到的变量主要有踏板力、 踏板位移以及制动减速度,而踏板力与制动减速度存在三种变化关系。
随着制动力增加,制动减速度均随之增加,不同的是(a)图呈线性增长,即踏板力与制动减速度是正比例关系;(b)图和(c)图 中制动减速度随踏板力呈非线性变化,前者增涨幅度是先慢后快; 后者是先快后慢,最后趋于平稳。
通过踏板力与制动减速度之间的关系和液压制动系统踏板位移、踏板力与制动压力之间的关系分析,可以初步建立起EMB系统的踏板力与制动减速度的对应关系。
当驾驶员踩下制动踏板,制动刚开始时不产生制动压力,即一段踏板空行程和空踏板力。随着踏板空行程结束会出现一个阶跃制动压力;
阶跃制动压力是一个非常重要的参数,在制动开始时可以给驾驶员很好的反馈,若没有这个阶跃量制动踏板给人的感觉会很迟钝。
1.3制动力最优分配策略
由于受轮胎和路面附着系数等因素的限制,车轮最大地面制动力的值应不大于附着力。当地面制动力超过附着力时,车轮会出现抱死拖滑现象,有可能会出现前轮抱死或后轮抱死等现象。
汽车制动工况种类
2.前后车轮同时抱死
3.前轮抱死或者前轮先于后轮发生抱死
4.后轮抱死或者后轮先于前轮发生抱死
制动稳定性分析
最理想的制动情况是前、后车轮都不发生抱死,制动稳定性最好
前、后车轮同时抱死,可以防止后轴侧滑,而且前轮只有在制动强度达到最大值时才会失去转向能力,附着条 件利用较好
尽量减少出现前轮发生抱死或前轮先于后轮发生抱死,虽属于稳定工况但失去转向能力
防止后轮抱死或者后轮先于前轮发生抱死,因为后轴容易发生侧滑属于危险制动工况
1.4制动力最优分配策略
汽车制动时轮胎不仅做滚动还会发生滑动,滑移率大小与附着系数存在一定的关系;
理想状态下汽车制动时前、后制动器制动力呈线性关系,但实际情况会存在一定偏量
滑移率与附着系数的关系
纵向附着系数 (也称制动力系数)是地面制动能力与垂直载荷的比值; 横向附着系数(也称侧向力系数)是侧向力与垂直载荷的比值
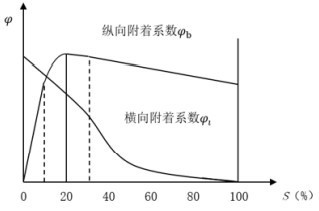
当滑移率在图中虚线范围内时,汽车制动最佳滑移率控制区,此区域路面附着条件利用的较好,制动性能和制动稳定都较好
理想制动力分配曲线
汽车在实际制动时由于会出现一个载荷转移量,故制动器制动力呈现 的不是线性关系
汽车制动力分配Ι曲线和曲线。同步附着系数为和Ι曲线的交点,制动时汽车会使得前、后轮同时抱死。实际制动力分配曲线位于理想制动力分配Ι曲线上方时,汽车制动时容易发生后轮先抱死;反之,汽车制动时容易发生前轮先抱死 。
2 线控制动系统关键技术—系统安全和容错技术
2.1系统安全和容错技术
EMB系统的应用一直受到安全可靠性的较大影响,因为任何一个电子信号的失效都可能会带来一个灾难性的后 果,故系统安全和容错技术显得尤为重要,这其中主要包括软件冗余与硬件冗余。
EMB系统常见故障类型
软件容错设计
由于硬件制造技术水平的提高和硬件容错技术的成熟,软件错误将成为导致系统失效的主要原因。因此,要求EMB系统软件具有较强的容错能力。可用以下方法提高软件的可靠性和容错能力:
利用自动纠错技术对关键数据进行数据冗余编码,提高关键数据的可靠性;
对关键数据,如状态字、标志位等,利用NVP技术和表决策略在系统故障时对其进行恢复;
对关键模块采用恢复块技术;
利用NVP技术及恢复块技术相结合的方法对故障后的系统进行恢复和重构
2.2系统安全和容错技术
考虑到EMB系统的实时性和成本等因素,热备份的动态冗余是最佳的选择方案,对制动踏板模块、ECU模块、 通信网络以及电源模块进行双冗余设计,可有效提高系统的可靠性。
考虑到轮毂空间有限、车轮制动器本身的冗余性(即当一个车轮制动 器失灵时,通过制动力分配,汽车可在其余三个制动器作用下实现制动),故车轮制动器模块没有进行硬件双冗余设计
踏板传感器组采用三种不同类型的传感器,即位移传感器、角度传感器和压力传感器。这样设计的目的是为了抵消单一类型传感器共态故障的影响,以提高系统的可靠性。同时,由于三个传感器的信号之间存在一定的对应关系,故通过对其信号的比对还可识别出传感器的故障。
为满足EMB系统高可靠性和实时性要求,各节点采用实时嵌入式系统 设计方案,而双机容错控制系统则整合计算机硬件级、操作系统级以及应用级的容错技术,在实现双机系统隔离的同时,通过通信方式实现不同处理机的互联,为在硬件容错中结合软件容错提供可能
通信网络可选用CAN FD。
2.3系统安全和容错技术
双机系统运行状况定义为:
(1)任何时刻都以主机的运 行结果作为系统输出,主机运行到检测点即向备用机发送日 志,备用机更新日志列表;
(2)若A机和B机均运行正常, 则将A机作为主机,B机为备份;
(3)若A机正常而B机有故 障,则将A机作为主机,同时B机将故障状况报告A机,并对B 机进行复位控制操作;
(4)若A机故障而B机正常,则将B机 作为主机,同时A机进行复位控制操作。
