
Shenzhen Chinadream Motor Technology Co.,Ltd




汽车转向系统是智能驾驶执行层中的核心部分。自动驾驶通过毫米波雷达、摄像头等感知设备对环境数据进行收集并传送至自动驾驶芯片进行任务决策,最后由转向系统、制动系统等实现自动驾驶。汽车转向系统能实现多项ADAS功能,如泊车辅助、车道保持、车道偏离预警等。随着自动驾驶升级,汽车转向系统将趋于线控化及与整车电子电气整合度加强。
名词详解:
*C-EPS:Column-Electric Power Steering,管柱式电动助力转向器,是一种电机安装于管柱上的电动助力转向器,其成本最低,助力响应性较好。
*P-EPS:Pinion-Electric Power Steering,小齿轮式电动助力转向器,是一种电机安装于小齿轮(Pinion)上的电动助力转向器。
*R-EPS:Rack-Electric Power Steering,齿条式电动助力转向器,即转向柱与电机在同一个机构(如滚珠丝杠或循环球)里并行耦合。
*DP-EPS: Double Pinion-Electric Power Steering,双小齿轮式电动助力转向器,齿条助力实现出色的转向感觉,提供高刚性和出色的动态性能。
*BD-EPS:Belt Driving-Electric Power Steering,带传动式电动助力转向器,电机的助力直接加载在齿条上。
*ECU:Electronic Control Unit,电子控制单元,由微处理器(MCU)、存储器(ROM、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。
*MCU:Microcontroller Unit,微控制单元,把中央处理器的频率与规格做适当缩减,并将内存、计数器、USB、A/D转换、UART、PLC、DMA等周边接口,甚至LCD驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。
观点阐释
(1)转向系统的目的是根据驾驶员意愿控制汽车的行驶方向,使汽车保持安全行驶;
(2)短期而言,电子助力转向系统将成为汽车转向系统主流;
(3)长期而言,线控转向系统是电子助力转向系统的升级,占用空间更少,安全性更高,将是未来趋势;
(4)汽车转向系统上游为ECU、扭矩传感器、电动机等零部件供应商,成本根据原材料价格波动而变化;中游为转向系统方案提供商,以国际企业为主导;下游为整车厂,拥有较强议价能力;
(5)线控转向具备方向盘与转向机完全解耦、节省驾驶舱空间、设计灵活、转向精准度高的特点,更加贴合高级别自动驾驶的需求,渗透率将快速提升。
转向系统: 定义与分类
汽车转向系统的目的是依据驾驶员意愿控制汽车的驾驶方向,保证驾驶安全,汽车转向系统根据能源来源可分为机械式和助力式汽车转向系统。
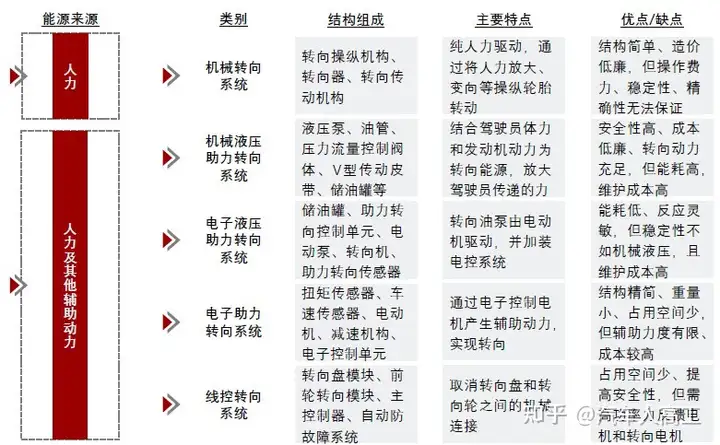
机械式汽车转向系统包含机械转向系统,助力式汽车转向系统包括机械液压助力转向系统、电子液压助力转向系统、电子助力转向系统及线控转向系统。其中,机械转向系统能源来自驾驶员,而其他四种转向系统能源来自人力及其他辅助动力。截至2020年,汽车转向系统以辅助动力转向系统为主。由于液压系统效率在60%-70%,而电子助力转向系统能高达90%以上,且结构简单和能耗少,因此,短期而言,电子助力转向系统将成为汽车转向系统主流。线控转向系统作为电子助力转向系统的升级,占用空间更少,安全性更高,将是未来趋势。
EPS与SBW技术原理
SBW和EPS均通过ECU对电机发出控制信号进而实现汽车转向;SBW是在EPS的基础上发展而来,其利用线控代替机械连接方向盘和执行机构。
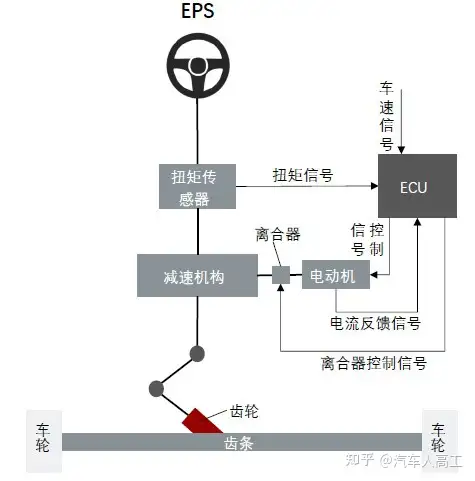
*EPS工作原理:方向盘转动时,扭矩传感器将检测到方向盘上的扭矩信号和转向信号传向ECU(ECU同时接收车速信号)。EUC根据信号决定电机的助力电流。最后助力电流通过ECU内部的电机驱动电路对电机实行扭矩控制。
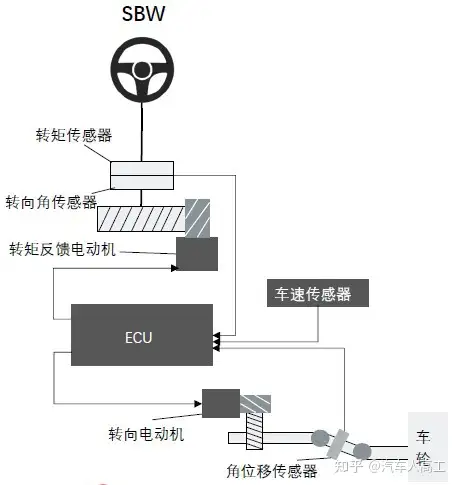
*SBW工作原理:用转矩传感器和传向角传感器检测驾驶员的转向数据,然后通过数据总线将信号传递到车上的ECU ,ECU再把转向指令发送至转向电动机,从而控制车轮转向。
*SBW是基于EPS发展而来,其利用线控代替机械连接方向盘和执行机构。截至2021年5月,SBW技术尚未成熟,仍以EPS为主,仅有英菲尼迪的Q50车型在2014年实质运用SBW,但因ECU程序有偏差而发出召回。
线控转向:全面商业化前夜
线控转向优势大,技术壁垒较高。相较于传统转向系统,线控转向带来的优点很多,比如可以节省空间,有利于整车轻量化,可以根据需要完全隔离路面颠簸或者部分传递路面信息,使驾驶员获得良好的路感,也可以根据驾驶员需要和喜好自由设计力传递特性和角传递特性,驾驶体验更丰富。同时,因为不用考虑机械连接的布局问题,所以车辆设计时更灵活,且发生碰撞时管柱侵入的可能性降低,提高了车辆安全性。

除此之外,线控转向可以实现转向系统与方向盘的完全解耦,这一点非常切合自动驾驶的需求,被认为是完全自动驾驶的辅助技术之一。SBW 的转向力矩完全依靠下转向执行器来输出,而下转向执行器输出力的方向和大小依赖于控制算法给定的控制信号,也就是说转向完全依赖控制算法,算法可以依赖方向盘的输入信号,也可以脱离方向盘根据自动驾驶的转向要求独立转向。
线控转向适应更高级别自动驾驶要求
汽车转向系统持续向更加智能、更加高效的方向发展。 EPS 相比传统的HPS,具有显著的降低能耗和减少排放的作用,使用率得到不断提升。EPS 主要分为C-EPS、P-EPS 和R-EPS,其中R-EPS的构造是将电机直接布置在齿条上,直接给予齿条助力,具备传动效率高、能量传递快转向精准等特点,适用于中大型SUV 和皮卡等车型。
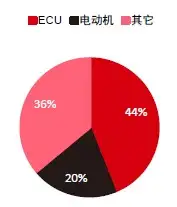
EPS 转向系统成本构成
相较于EPS,SBW 进一步提升了转向系统的电子化程度,使用线控技术代替方向盘、执行机构之间的刚性机械连接,也被称为柔性转向系统,主要由转向盘系统、电子控制系统、转向系统三个部分组成。其在改善路感、改善转向特性、提高稳定性和安全性方面有明显优势,并且有利于底盘一体化集成控制。