
Shenzhen Chinadream Motor Technology Co.,Ltd




1 线控转向系统大脑分析
• 线控转向大脑硬件控制电路包括电机转子位置获取电路、主控电路、电机驱动电路以及电流采样电路等;
• ECU信号数据输入包括方向盘转角、转矩,转向轮转角、转矩,转子电角度,电机电流,车速,侧向加速度, 横摆角速度,齿条位移等;数据输出给转向电机和路感电机,转向电机完成汽车转向,路感电机实现路感模拟。
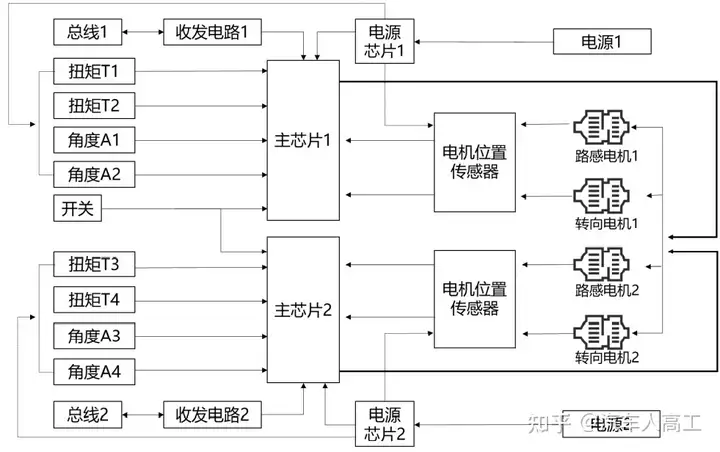
› 硬件控制电路:电机转子位置获取电路、主控电路、电机驱动电路、以及电流采样电路等。
› 电路硬件设计:采用双冗余设计,即芯片、电源、电机等均用两套零件;
› ECU信号数据输入:方向盘与转向车轮的转角、转速、扭矩,方向盘力矩,转子电角度,电机电流,车速,侧向加速度,横摆角速度,齿条位移等;
› ECU信号数据输出:信号数据输出给转向电机和路感电机,转向电机完成汽车转向, 路感电机实现路感模拟功能;
2 线控制动系统大脑分析
• 线控制动系统大脑接收制动踏板发出的各类信号,用于确定驾驶员意图或者判断整车动力学状态,并将控制信 号通过总线发送给各个执行器、子控制器。执行器、子控制器接受来自主控制器的动作信号,控制电机使执行 器产生所期望的目标制动压力。
EMB系统ECU接口电路图
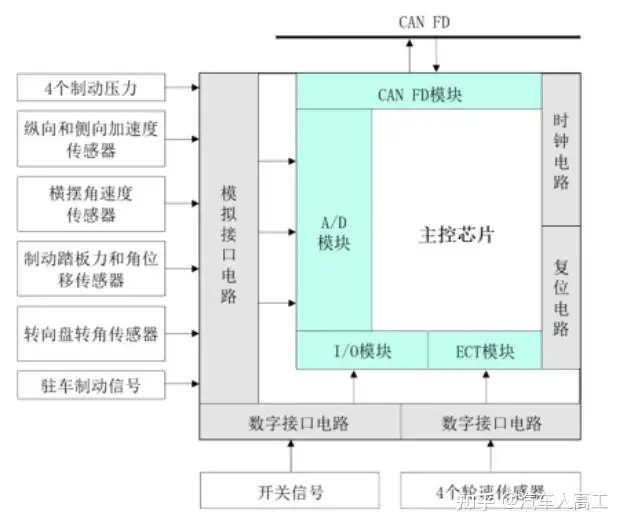
› 电路说明:制动踏板信号由制动踏板力和角位移传感器产生,车辆运行状态采用纵向和侧向加速度传感器、转向盘转角传感器及横摆角速度传感器测量,各车轮的目标制动力经CAN FD网络传输给各车轮EMB控制器;
› ECU作用:①接收制动踏板发出的信号,控制制动执行器制动;②接收驻车制动信号,控制驻车制动;③接收车轮轮速传感器信号,识别车轮是否抱死、打滑等;④控制四个车轮制动力,实现制动防抱死和驱动防滑等;
› 控制算法:在线控制动系统控制过程中存在着非线性及不确定问题,主要是由于轮胎特性、负载、制动器及路面的不断变化,所以这对控制器提出了较高的鲁棒性要求。目前对于线控制动系统的控制方法有很多,包括经典PID控制、滑模变结构控制、自适应模糊控制等。
3 线控驱动系统大脑分析
• 线控驱动系统大脑为驱动电机控制器,其主要功能包括车辆的怠速控制、车辆前进(控制电机正转)、车辆倒 车(控制电机反转)、DC/AC等。
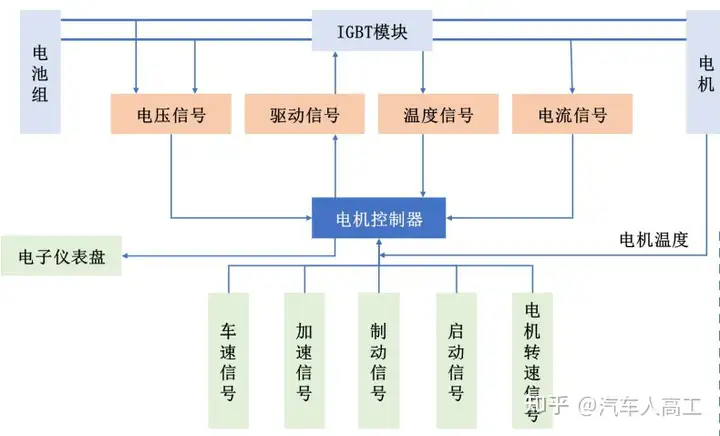
• 当电机控制器从整车控制器处得到扭矩输出命令时,将动力电池提供的直流电转化成三相正弦交流电,驱动电机输出扭矩,通过机械传输来驱 动车辆,也可以完成由车轮旋转的动能到电能的转换,给电池充电。

• 功率IGBT模块采用直接水冷模块设计,功率模块为英飞凌的HPD模块。 驱动板通过PRESS FIT连接方式和功率IGBT相互连接。为满足整车EMC要求,直流母线输入端采用共模滤波组件。低压侧供电电源的范围: 6.5V-16V,其中9-16V控制器可以工作在扭矩输出模式。三相母线交流输出侧通过快插连接器到机壳外部供客户使用,防护等级IP67。
• 算法为转子磁链定向矢量控制方式。输入变量VCU通过CAN发送的扭矩指令信号,输出为电机实际扭矩。为确保扭矩安全,利用能量守恒原理, 利用电机控制器的有功输出平衡原理,实现电机实际扭矩输出的监控。
4 线控悬架系统大脑分析
• 线控悬架系统的控制大脑具备车辆运行状态实时诊断,结合车辆自身状态和外界道路状况形成空气弹簧和线控 减震器的控制命令。
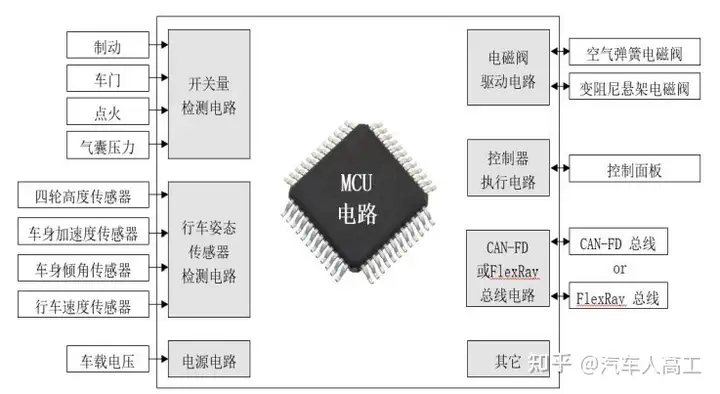
线控悬架控制大脑电路图示例
线控悬架控制大脑功能特性
功能特性
➢ 主要结构:MCU 控制系统、电源电路、开关量输出电路、电磁 阀驱动电路、开关量接口电路、高度传感器接口电路、RS232串 行通讯电路以及CAN FD总线电路。
➢ 实时诊断:传感器反馈信号给控制器,实时监测诊断悬架状态
➢ 控制目标:调节悬架高度和减震器阻尼,保证行驶品质最优
传输信号
➢ 传输信号:线控悬架属于底盘系统核心部件,控制器对信号传输速度和安全性均有较高要求,主流传输协议是CAN FD和FlexRay。
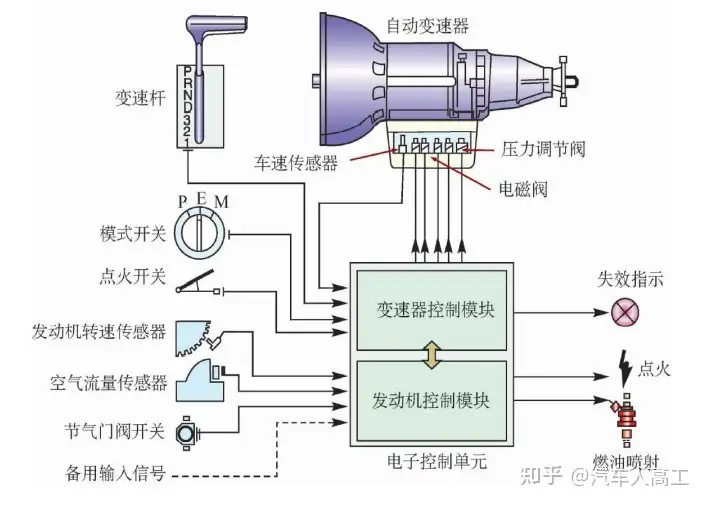
5 线控换挡系统大脑分析
• 线控换挡系统通常与自动挡变速器匹配,线控换挡系统结构相对简单,但是输入信息和换挡逻辑复杂,通常由 变速器企业自主调校。此外,由于纯电动汽车通常只有主减速器,换挡机构相对简单。
线控换挡系统结构示意图
线控换挡系统功能特性
功能特性
➢ 线控换挡结构:由输入、控制、执行部件构成。输入装置包括各 种开关、传感器;ECU控制单元主要决定换挡时机;执行机构是液压控制组件的电磁阀
➢ 线控换挡优势:防止误操作、操作方便且舒适性强、布局方便
纯电动汽车换挡特性
➢ 纯电动汽车的电机扭矩通常大于燃油车,故多采用单级主减速器, 线控换挡通常只涉及空挡、驻车档和倒挡。
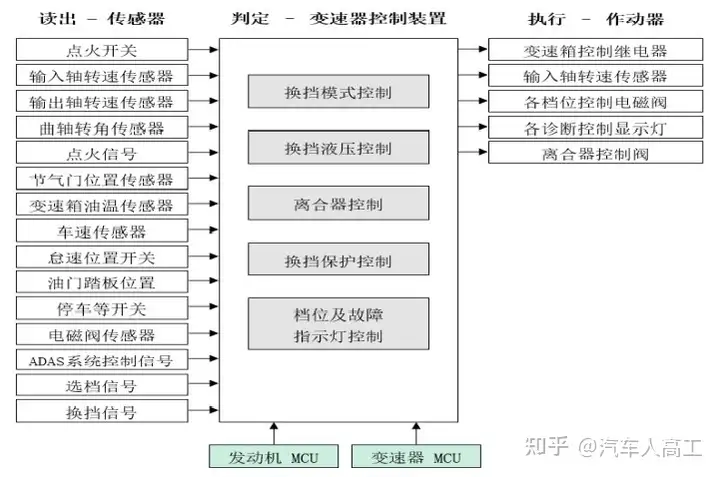
• 线控换挡控制系统的运算逻辑较为复杂,需接入发动机和变速器的MCU状态数据,实时交互判断;
• 换挡过程中会在启动或者接收到换挡信号时会结合车辆运行现状,通过逻辑判断执行时机。
线控换挡机构控制大脑线路图
技术特性
软件功能
➢ 换挡器软件功能主要包括挡位判断、挡位显示、电机闭环控制、故障诊断、挡位自学习和车辆状态逻辑判断等 ➢ 容错功能:车辆启动时默认车辆在P档;在接到升降档需求输入时,控制系统会根据车辆运行状态判断是否满足执行条件。
通信信号
➢ 线控换挡有两种总线,一类是控制信号线,多使用传输速度相对 较高的CAN FD和FlexRay,如传感和换挡执行信号;另一类是显示信号线,多使用速度相对较低的LIN,如档位指示灯和故障灯。
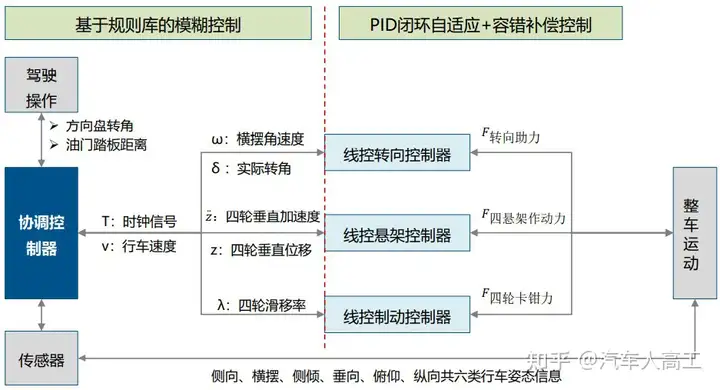
6 汽车底盘多系统协调控制
• 协调控制器涉及参数较多且应用工况复杂,通常采用模糊边界控制原理,控制规则和规则边界通常由仿真测试 和实际路试结果确定。协调控制的主要作用是根据集成系统的控制规则和规则边界,协调各子系统的工作模态, 子系统的细微控制权由子系统把控。
协调控制器概述
➢ 定义:协调控制方式(又称监督控制)是实现底盘集成控制的主要方式之一,其最大的特点是尽可能减少对原有独立模块的改动,在子控制器集合上增设一个监督控制器,达到协调各子系统的目的。
➢ 范围:悬架系统通常涉及车身姿态控制,不涉及与路面的滑移控制,相对独立。通常说的协调控制主要是制动和转向两个子系统的协调控制。
协调控制器原理示意图
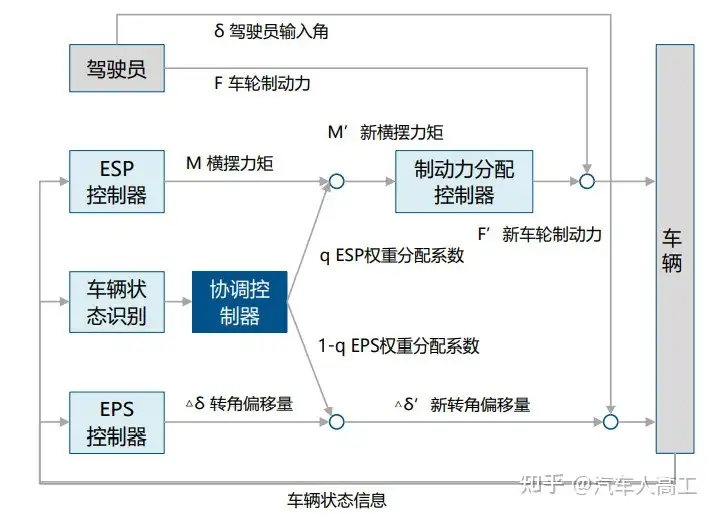
• 转向和制动系统的协调控制核心在与临界点判断和控制权重分配,瞬态的特征车速和横摆角速度是主影响因子。 • 就单个车轮而言,制动干预比转向干预能获得更大的横摆力矩;且大制动力时,转向系统近乎失效。所以制动 系统控制权限相对较高。
转向和制动系统协调控制原理图
权重系数分配示意
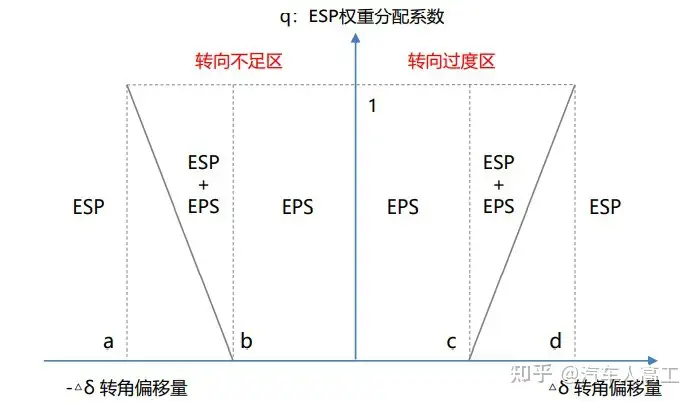
➢ b~c处于稳态,以EPS自主控制为主
➢ a~b和c~d处于不稳定状态,ESP和EPS同时控制,分配系数即直线对应点斜率
➢ a左边和d右边属于极不稳定状态,EPS已丧失作用力,仅ESP控制车身姿态