
Shenzhen Chinadream Motor Technology Co.,Ltd




1.1线控转向系统发展现状
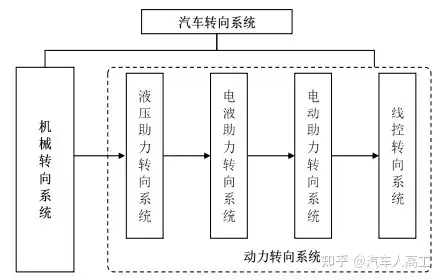
• 汽车转向系统经历了机械转向系统、液压助力转向(HPS)系统、电液助力转向(EHPS)系统、电动助力转向 (EPS)系统、线控转向(SBW)系统等几个阶段;
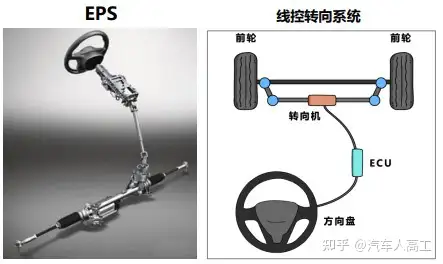
• 线控转向系统较EPS取消了方向盘与转向轮之间的机械连接装置。
1.2线控转向系统发展现状
• 世界各大汽车厂家、供应商等对线控转向系统做了深入研究,国际知名供应商如TRW、Delphi、ZF等制造了物 理样机,进行试验研究;国际著名汽车生产商如奔驰、宝马、通用等展出采用线控转向系统的概念车;
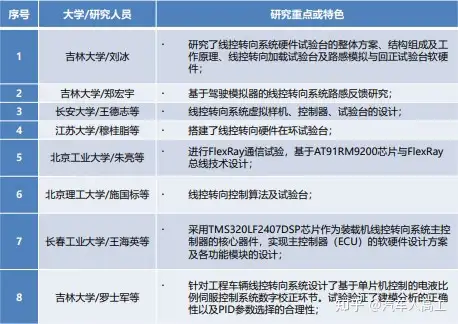
• 目前国内对线控转向系统的研究多数以高校的理论为主,并且已经取得一些进展。

1.3线控转向系统发展现状
• 1988年2月,日本铃木公司首次在其Cervo车上装备EPS,随后还用在了其Alto车上,随后日本丰田、三菱、本 田,美国Delphi、TRW,德国ZF、BOSCH等都相继研制出各自的EPS;
• 2000年前后,EPS通过昌河北斗星车型引入中国,未来C-EPS应用在小型车,DP-EPS及RP-EPS应用在中大型车。

› 1988年2月日本铃木公司首次在其Cervo车上装备EPS,随后还用在 了其Alto车上;
› 在日本铃木推出之后,日本丰田、三菱、本田,美国Delphi、TRW、 德国ZF、BOSCH等都相继研制出各自的EPS;

› 2000年前后,EPS通过昌河的昌河北斗星车型引入中国汽车市场, 昌河北斗星搭载原装日本NSK的第一代EPS;
› EPS目前在轿车上逐渐得到广泛应用,未来C-EPS应用在小型车, DP-EPS及RP-EPS应用在中大型车;
2.1线控转向系统基本结构
• 线控转向系统分为三个部分:转向盘模块、转向执行模块和中央控制单元(ECU);
• 转向盘模块包括方向盘转矩、转角传感器,路感电机及其减速器等部件;转向执行模块包括直线位移传感器、 转角传感器、转向电机及其减速机构等部件;另外线控转向系统还包括转向控制器和电源等部件。
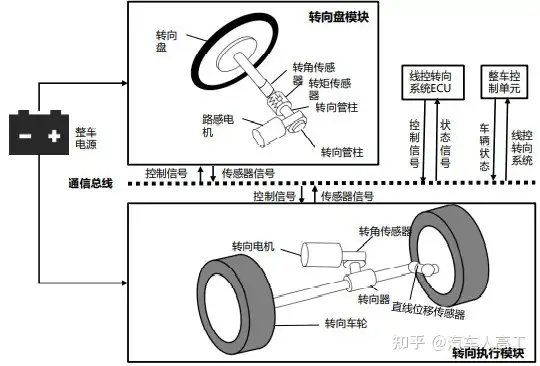
› 转向盘模块:方向盘,用于接收驾驶员的转向操纵;方向盘转矩 传感器和转角传感器,分别用于采集驾驶员通过方向盘输入的转 矩、转角和转速;路感电机及其减速器,为驾驶员提供路感信息, 输出方向盘的回正力矩;
› 转向执行模块:直线位移传感器,采集转向执行器直线位移信号, 将其转换为前轮转角信号;转角传感器,采集转向车轮的转角信 息;转向电机及其减速机构,用于克服转向阻力,带动转向系统 转过相应的角度;齿轮齿条转向器,接受并放大转向执行电机输 出转矩,驱动转向车轮转向;
› 转向控制器:转向盘模块控制器,其采集转向盘模块相关信号, 接受目标回正力矩信号,向路感电机发送控制信号;转向执行模 块控制器,其采集转向执行模块相关信号,接受目标转向车轮转 角信号,向转向电机发送控制信号;
› 电源:线控转向系统与整车其他电器设备共用一个蓄电池电源, 目前整车电源主流为12V电源,48V电源将是未来发展趋势;
2.2线控转向系统布置方式分类
按照转向电机的数量、布置位置与控制方式不同,目前线控转向系统的典型布置方式可分为五类,分别为单电 机前轮转向、双电机前轮转向、双电机独立前轮转向、后轮线控转向和四轮独立转向。
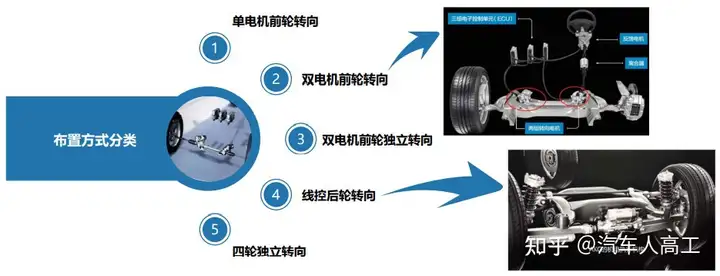
2.3线控转向系统布置方式比较
双电机前轮转向布置方式冗余性好,且对单电机功率要求较小,英菲尼迪Q50采用这种布置形式,但该形式零 部件成本增加,冗余算法较复杂。

2.4 线控转向系统工作原理
驾驶员转动方向盘时,转角位移传感器将驾驶员意图转换成数字信号,连同整车其他的信号,例如车速信号等 通过总线传输给ECU,ECU再根据设定好的算法计算出前轮转角并将该信号传递给转向电机完成转向,另外通过 转向阻力传感器获得转向阻力信息后,根据回正力矩算法,将回正力矩大小传递给驾驶员完成路感反馈。
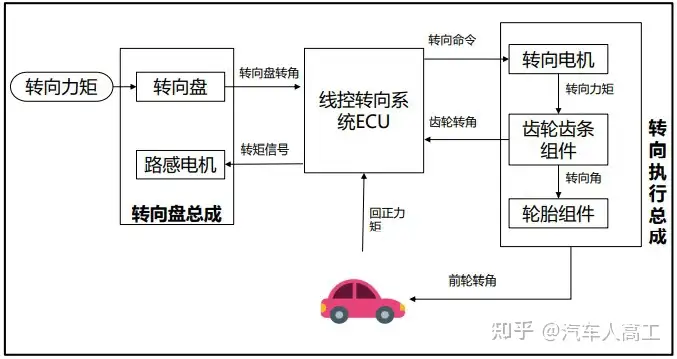
› 转向输入:当驾驶员转动转向盘时,转 向盘转角位移传感器检测出驾驶员转向意图,并将其转换成数字信号连同车速信号、横摆角速度信号、侧向加速度信 号、道路附着条件以及其他车辆行驶相 关信息通过数据总线传输给线控转向系 统ECU;
› 实现转向:ECU按照提前设定好的前轮 转角控制算法,计算出前轮转角控制信 号,并将其传递给转向电机,进而控制 转向车轮输出目标前轮转角;
› 实现路感反馈:ECU通过转向执行系统 的转向阻力传感器获得转向阻力信息, 按照提前设定好的回正力矩计算方法, 计算出回正力矩的大小,将其传递给转 向盘系统中的路感电机,使驾驶员获得 一定的反映路感信息的回正力矩;
2.5 线控转向系统关键技术—容错技术
• 电机中的开关管断路、旋变信号异常和温度传感器异常等故障发生概率较高,对系统影响也较大;
• 传感器中的短路、开路和机械故障等对系统影响较大,但是发生频率不高;
• 通信总线中的接头接触不良对系统影响较大且发生概率较高。
线控转向系统可能出现的故障类型及发生概率:



› 电机故障:对系统影响较大的故障分别是电 机绕组断相、电机绕组短路、开关管短路、 开关管断路、故障混合出现、旋变信号异常 和温度传感器异常等,且出现频率较高的故 障有开关管断路、旋变信号异常和温度传感 器异常等;
› 传感器故障:对系统影响较大的故障分别是 短路、开路和机械故障,虽然信号混入出现 频率较高但对系统的影响程度较低;
› 通信总线故障:对系统影响较大的故障分别 是接头接触不良、开路、总线初始化故障、 总线发送超时故障、总线接收超时故障等, 且出现频率较高的故障主要是接头接触不良, 虽然信号混入出现频率较高但对系统的影响 程度较低。
目前的容错方法从技术的角度可以分为两大类:一类是依靠硬件备份的冗余技术,一类是依靠软件的容错算法技 术。硬件冗余方法主要是通过对重要部件及易发生故障部件提供备份,以提高系统的容错性能;软件冗余方法 主要是依靠控制器的容错算法来提高整个系统的冗余度,从而改善系统的容错性能。
线控转向系统两种容错方法:
硬件冗余
› 硬件冗余方法:通过对重要部件及易发生故障部件提供备 份,以提高系统的容错性能;
› 方案:线控转向系统中的电机、传感器、ECU、电源、通 信网络等易发生故障的硬件部分进行备份设计,备份的装 置可以实现与原装置一样的功能,备份的装置可以与原装 置同时工作,也可以一个工作而另一个处于待命状态;
软件容错
› 软件容错方法:依靠控制器的容错算法来提高整个系统的冗 余度,从而改善系统的容错性能,一是对软件自身故障的处 理;二是使用软件对系统中出现的其它故障进行处理;
› 方案:软件容错算法在不改变转向系统结构、增加过多设备 的情况下,对故障后、剩余正常工作的转向系统装置进行控 制。当部分装置故障时,通过实时数据采样,定位故障类型 与位置,通过整合剩余正常工作的装置,互相协同工作,从 而达到正常工作状态;
• 硬件备份技术与软件容错技术具有高度互补性;
• 未来的线控转向系统将是同时拥有硬件备份与容错算法的高度智能的系统。
线控转向系统两种容错方法对比:
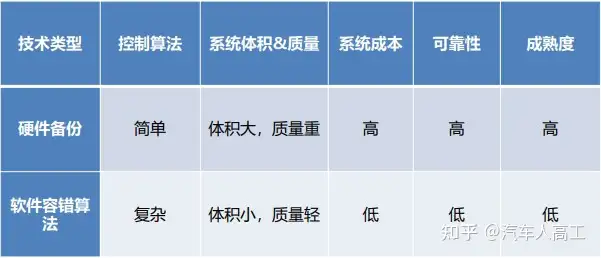
› 硬件备份技术与软件容错技术具有 高度互补性;
› 硬件备份技术能够在硬件层面提升 容错控制技术的可靠性;
› 软件容错技术能够减少因硬件冗余 导致转向系统在空间体积等方面的需求。
✓ 未来的线控转向系统将是同时拥有硬件备份与容错算法的高度智能的系统。
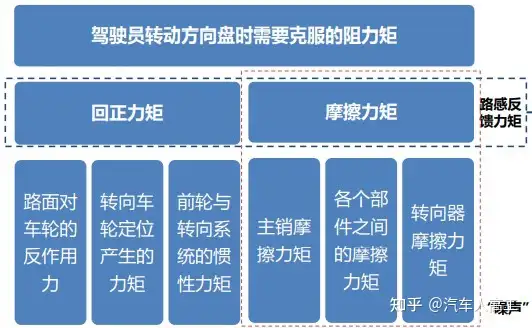
2.6线控转向系统关键技术—路感反馈
• 驾驶员转动方向盘时需要克服的阻力矩主要包括两方面,即回正力矩和摩擦力矩,而路感反馈力矩包含回正力 矩和摩擦力矩;
• 获取路感反馈力矩方法有参数拟合法、传感器测量法和基于动力学模型的方法,其中第三种是目前研究的主流。
基于动力学模型的方法,依据车辆动态响应、驾驶员转向盘输入等状态,利用车辆动力学模型估算轮胎回正力 矩和需要补偿的反馈力矩,进而计算期望的反馈力矩指令。
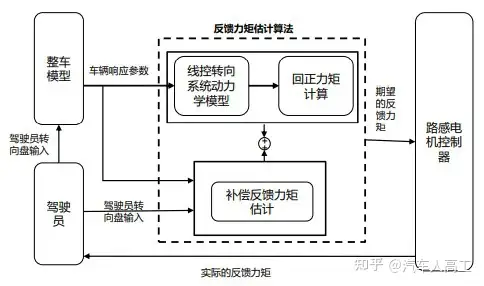
› 创建线控转向系统动力学模型:线控转向系统动力学模型可以分 为方向盘转角、路感电机转角、转向电机转角和左、右前轮绕主 销转动五个自由度。将模型分为六部分,即方向盘组件、路感模 拟组件、转向执行组件、齿轮齿条组件和左、右转向前轮组件六 部分。其中,左、右转向前轮组件和前轮绕主销回正力矩模型与 传统转向系统相同;
› 回正力计算:转向器齿条受力包含回正力矩和摩擦力矩,回正力 矩包括由轮胎侧向力与轮胎拖距共同造成的回正力矩和主销内倾 内移造成的回正力矩,齿条力的获取可以通过加装传感器测量, 但这会增加系统的成本,而且也不易安装。此外,传感器的测量 信号也很难直接应用到控制策略中,因为测量信号中夹杂着噪声 需要处理,这也增加了工作量和控制策略的复杂程度。可以采用 卡尔曼滤波技术等实现对转向器齿条力的估计。
2.7 线控转向系统特点分析
• 线控转向系统有改善操纵稳定性、提高舒适性、节能环保、提高被动安全性和利于整车轻量化等优点;
• 但线控转向系统的安全性和可靠性一直是阻碍其落地的核心障碍。
线控转向系统优势
(1)改善操纵稳定性
有效地实现了转向系统和方向盘两者之间的同步,从而使得驾驶员对于汽车的控制更加的灵敏;
(2)提高舒适性
避免汽车在行驶的过程中由于地面的不平整以及转向轮的 不平衡等因素所导致的抖动传递到方向盘上;
(3)节能环保
线控转向系统只需要在转向的时候进行工作,不仅有效增 加了传动效率,而且还使得燃油更加的经济、环保;
(4)提高被动安全性
在碰撞发生时,由前围入侵传递到转向管柱上的碰撞能量 几乎为零,提升了整车发生碰撞时对驾驶员的保护性能;
(5)利于整车轻量化
线控转向系统取消了方向盘与转向轮之间的机械结构,使转向系统质量减轻了大约5千克;
线控转向系统劣势
(1)硬件上需要较高功率的路感电机和转向电机,软件上 需要复杂的力反馈电机和转向执行电机的算法实现;
(2)线控转向系统的安全性和可靠性有待提高,这也 是各大车企考虑的核心问题;
(3)冗余设备导致额外增加的成本和重量也是阻碍其发 展的因素之一。
2.8 L3/L4/L5级转向方案
• L3/L4级别自动驾驶硬件采用六相电机,独立双两路扭矩传感器和芯片、电路板双冗余的ECU等,总线采用CAN FD,控制算法用PID算法;
• L5级别自动驾驶会取消转向电机、路感电机和方向盘等,使用轮毂电机实现其功能,ECU采用芯片、电路板等 双冗余设计,控制算法除了PID算法外,还可能会用到模糊算法和神经网路等,总线技术会使用车载以太网。
L3/L4级别自动驾驶转向方案(EPS/线控转向系统)
冗余设计:
(1)电机设计
在冗余电机中,可采用六相电机,这样就是双三相电机。对于六相电机,当某一相电机绕组出现故 障时,可以关闭对应的三相电机助力,剩下的三相电机仍然能提供50%的助力;
(2)扭矩传感器设计
在满足L3/L4等级的冗余线控转向和EPS中,至少需要三路扭矩信号,有四路信号更好,在L3及以 上等级的EPS和线控转向系统中采用独立的双两路信号的扭矩传感器;
(3)ECU和电气设计
将控制系统进行双份设计,即芯片、电路板等均用两套零件。其中,主芯片和冗余芯片需要运行不 同的算法,主芯片使用PID算法,且运算后的扭矩指令需要进行比较;
总线技术:CAN FD
ECU控制算法:PID算法
L5级别自动驾驶转向方案
• 结构变化:硬件上转向电机、路感电机和方向盘等将取消,以轮毂电 机代替并实现其功能;
• 冗余设计:对ECU同样进行冗余设 计,是将控制系统进行双份设计, 即芯片、电路板等均用两套零件;
• ECU控制算法:除了PID算法外还 可能会使用模糊算法、神经网络;
• 总线技术:车载以太网;
欢迎留言讨论线控转向相关的技术实现方案!