
Shenzhen Chinadream Motor Technology Co.,Ltd




1 线控转向系统简介
随着汽⻋⼯业的不断发展和⼈们⽣活⽔平的不断提⾼,汽⻋不 再只是⼀个交通⼯具,⼈们在购买⻋辆的同时更注重体验和与 ⻋辆的交互上。直接影响驾驶体验的就是⽅向和速度的控制, 为了使驾驶体验更加让⼈满意,汽⻋公司将助⼒系统加⼊到了 控制环节中,转向助⼒便是其中⼀种。
转向助⼒系统早在1902年便已经问世,最初的助⼒⽅式为机械 液压助⼒,后来发展到液压助⼒转向系统(HPS),再后来电动液 压助⼒转向系统(EHPS)在⽇本问世,直到1988年电⼦转向助⼒ (EPS)才成功登上历史舞台。整个发展过程⻓达80年之久,⽽今天EPS逐渐成为主流,同时也为电控技术奠基。
2 线控转向硬件组成
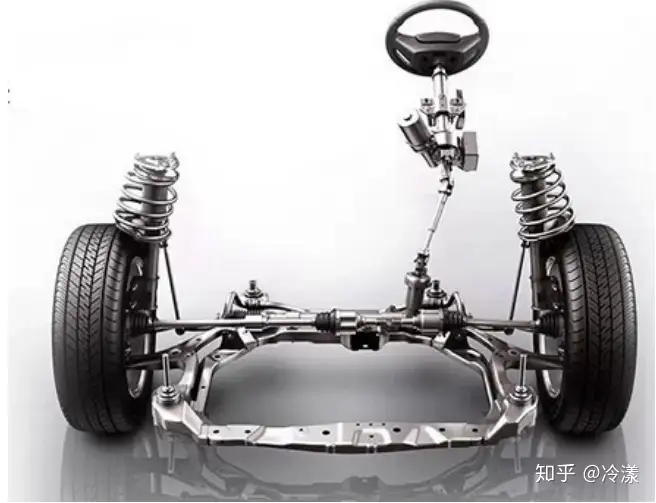
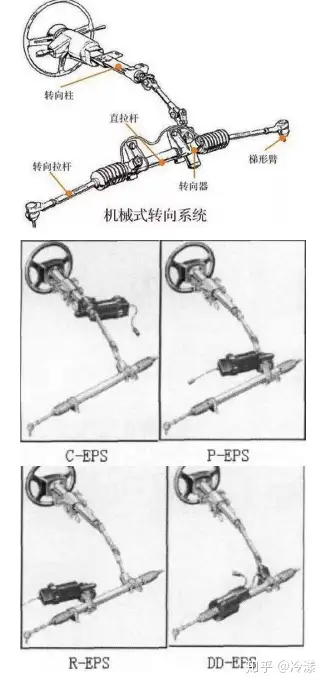
>转向系统构成:在介绍EPS之前必须弄清楚汽⻋转向原理和组成部分,汽⻋的转向系统中 包括⽅向机总成、万向节、⽅向柱总成和⽅向盘四个部分。在驾驶员转动⽅向盘时,⽅向盘转动通过⽅向机转换成⽴轮胎的旋转,最后实现转弯的过程。
>EPS种类:由于每⼀种⻋型空间结构的不同,所以线控转向助⼒可根据电机所在位置分成不同的⼏个类型:
C-EPS:转向柱主⼒⽅式,助⼒电机安装在转向柱上⾯,这也是应⽤最为⼴泛的⼀种类型。
P-EPS:助⼒电机和⽴放⼤机构安装在⼩⻮轮上(转向柱万向节和转向机连接处),这种助⼒系统由于不安装在驾驶空间中,所以可以提供较⼤的转向⼒。
R-EPS:助⼒电机安装在转向机的直拉杆⻮条上,直接驱动直拉杆进⾏转向。这种类型的EPS安装灵活,节省空间。
DD-EPS:将助⼒电机的主轴和转向机拉杆融合,这种转向机类型⽐较少⻅。
>EPS系统组成:EPS包括三个部分:1.⽤于获取转向⻆度和驾驶员⽅向盘扭矩的扭矩传感器。2.⽤于提供转向⼒的助⼒电机,这⾥电机会和⻋重进⾏匹配,电机转矩⼤部分能够提供独⽴转向的转向⼒,所以可以实现⾃动转向控制。3.⽤于控制电机转动和处理输⼊信息的中央处理器,EPS助⼒⻄东的ECU(电⼦控制单元)。
>扭矩转⻆传感器:转矩转⻆传感器主要是⽤来检测驾驶员是否在转向和旋转的⽅向,当然⼀些⻋辆如果有⼀些如ESP等功能,则助⼒系统还会有⼀个转⻆传感器,扭矩和转⻆传感器被封装在转向柱上。有⼀种改装线控的⽅法便是通过⾃治的控制器向ECU发送假的扭矩信息,是让ECU以为驾驶员在转动⽅向盘促成ECU控制电机实现转动。
>控制电机:EPS转向系统的执⾏机构,该电机为⼀个12V的直流电机,ECU根据输⼊ 信号来控制电机正反转和电流,从⽽控制转矩。
>转向电机控制器:在EPS中该控制器为核⼼控制器,主要任务是将输⼊的转矩信号通过⼀定运算来输出对应的电机控制信号,当然该模块的解锁需要很多信息,如⻋速,上电信号等等。

2 线控转向控制原理
>线控转向的信号输⼊:判断⼀种⻋型是否具备线控转向的能⼒便是判断该⻋型是否具备ESP⻋身稳定系统或则⻋道保持等⾼级功能,因为
如果具备这些功能则助⼒转向系统⼀定会输出转⻆信息。获得转⻆信息是使线控转向闭环控制的必要条件。
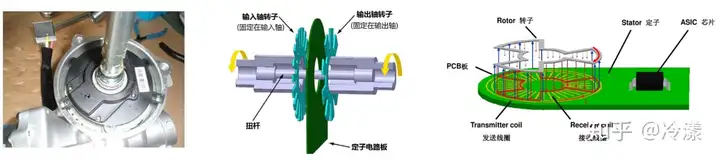
⼤部分⻋型的转矩转⻆传感器都采⽤⾮接触式转⻆转矩传感器,这种传感器内嵌在转向柱上,其原理是使⽤霍尔感应的⽅式来检测转向和转⻆信息。其主要组成部分为输⼊/输出轴转⼦(⾦属⽚),定⼦电路板和扭杆及部分组成。
传感器会输出两种基本信号到控制单元中,⼀种是扭矩⼀种是⻆度,⼀般信号波形为⽅波。 在输⼊控制单元之后,控制单元对数据进⾏处理然后将转向⻆信息以CAN报⽂的⽅式发送出去。控制单元接⼝中⼀路为输⼊接⼝,这路接⼝包含了传感器输⼊的相关信息,⼀路为输出接⼝,这路包含了重要的CAN接⼝,转⻆信息从这⾥发出。
>线控转向信号输出:转向助⼒控制单元的启动需要“解锁”之后才能 够正常⼯作。⽐如在转向助⼒控制单元正常供电和连接的情况下,需 要给该模块固定引脚发送“钥匙”信号,此时模块才会正常的⼯作,发送和接收消息。还有⼀些模块安全级别较⾼,可能需要正常的CAN消息输⼊才能启动。⼀般情况下转向助⼒系统⽆法从整⻋中独⽴出来使⽤,它必须要在整⻋环境或者是模拟的整⻋环境中才能正常⼯作。
在保证正常的⼯作情况下,要获得转向⻆数据必须先找到对应的CAN 总线位置,由于CAN是差分信号,所以很容易便可以找到该总线的位 置,因为CAN总线上的电平在⾮静默状态下电压会在2.5V上下跳动,有条件可以利⽤示波器进⾏侦测。
找到CAN总线的位置之后,便可以通过之前介绍的USB-CAN设备进⾏分析了,连接USB-CAN设备到CAN⽹络中,此时转动⽅向盘,与之对应发出的CAN消息数据会有规律变化,但是通常CAN数据量巨⼤,也许不⽌⼀个ID的数据帧在有规律的变化,所以这个筛选的过程很繁杂但是也是破解中最关键的⼀个环节。

3 线控制动系统简介
传统的制动系统采⽤的是液压制动,制动系统包括⼏个部分:制动踏板,主 油泵,连接管路和制动器四部分组成,当踩下制动踏板时,与踏板连接的推杆会压缩主泵,主泵内部的油压会升⾼直接增加与之连接的油路内部的油压,压⼒增加之后制动钳会夹紧四个轮⼦上⾯的刹⻋碟,通过制动钳上的摩擦⽚和刹⻋碟之间相互摩擦来降低⻋速,由于汽⻋制动需要在制动踏板之上施加很⼤的⼒,所以像真空助⼒,电⼦助⼒制动的系统也不断出现。
随着线控技术(x-by-wile)的不断发展,线控制动技术也应运⽽⽣,由于像ESP和ABS防抱死系统之类的⾼级辅助驾驶功能的需要,线控制动技术也得到了很⼤程度的发展。
线控制动系统是在传统制动的⽅式之上在制动踏板和主泵之间增加了⼀个电⼦液压控制单元(ABS)来实现对制动油压的调节,同时在制动管路中增加了对油压检测和对速度检测的传感器,实现压⼒和速度的闭环控制。 需要注意的是电⼦防抱死系统(ABS)和线控制动系统(EHB)是分开的两个系统,但是⼯作原理类似。
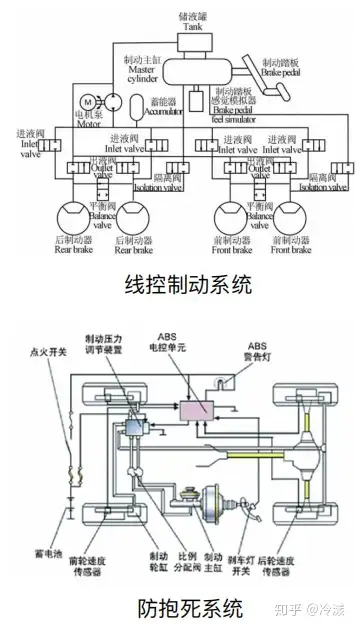
线控制动系统的主要部分有传统的制动液压系统和电⼦液压控制系统两部分 组成。传统的液压控制系统包括制动踏板,总泵,油路,制动器和制动盘⼏ 个部分。在传统的液压制动回路中增加电⼦油压调节泵,电⼦线控制动控制单元,油压传感器和⻋速传感器(如果CAN总线中提供速度信息则可以兼容) 等部分后边组成了线控制动系统。
>线控电⼦控制单元:主要作⽤是接收来⾃⾃动踏板的输⼊信号后经过该单 元的处理后,以结果为⽬标值来驱动线控制动泵⼯作以此来达到制动减速。 同时还接收制动回路油压,⻋速等信息来作为参考依据从⽽实现闭环控制。
>线控制动泵:线控制动泵是线控制动的执⾏部件,接收控制单元的控制信 息后电机泵⼯作,油路压⼒增加。⼀些制动泵还会配备蓄能灌,将压⼒提前存储起来,以实现快速相应和增加制动压⼒的⽬的。

3.1 线控制动系统控制原理
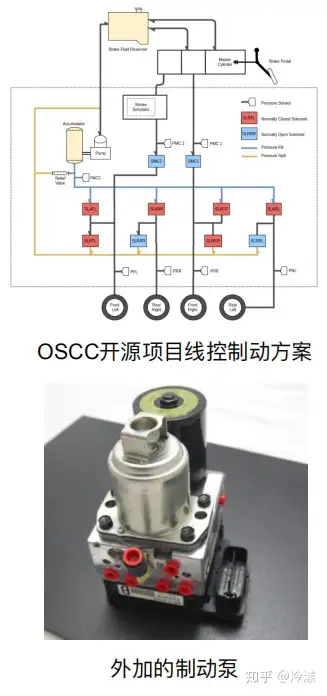
线控制动是线控技术中最困难的⼀部分,所以市⾯上绝⼤部分⻋型是不具备线控制动能⼒的,只有⼀些⾼端⻋辆才携带了线控制动的能⼒,⼤部分线控⽅案是通过外加硬件来实现线控制动的控制,github开源项⽬OSCC便是其中⼀个。
在普通⻋辆没有直接的线控制动功能的情况下,为了保证原⻋本身系统的稳定(保留原有的ABS功能),⼀般的⽅案是在该⻋制动系统的基础上外加制动泵可控制单元来实现线控制动。
在这种⽅案下,⼀般需要独⾃开发电⼦控制单元,从⻋身中获得速度和油压信息,并通过独⽴的制动泵来控制系统油压,最后实现线控制动功能。
>获得油压信息:油压信息需要压⼒传感器来检测,⼀些制动泵会提供压⼒传感器,集成在泵体中,⼀些没有则需要外加油压传感器。找到泵体的对应信号线便可取得。
>控制每路油压:压⼒的产⽣是通过驱动电机泵来实现的,但是控制压⼒则需要控制泵体中的电磁阀来实现。由于有四个轮⼦需要独⽴的控制(简化可以⽤辆来并联控制),每⼀路分路都需要控制液压油的输⼊与输出,也就是增压和减压,所以总需要⼋个电磁阀来实现,再加上两路总回路的控制,所以⼀共需要⼗路电磁阀需要控制,同时再加上四路分油路各⾃的压⼒传感器和总油路的压⼒传感器,所以⾄少需要控制六个压⼒传感器,在控制器控制程序的编写上是线控制动改装最困难也是最核⼼的⼀部分,它 直接影响了线控制动的质量。
为了和整⻋CAN⽹络同步,所以⾃制的线控制动控制器也需要连接到CAN⽹络中,同时应向总线中发送相关报⽂和接收来⾃总线的控制。注意报⽂ID应该避免和原⻋报⽂ID冲突,不然会造成⽹络的瘫痪。
4 线控动⼒系统简介
线控动⼒系统是汽⻋最基本的系统,由于现在新能源汽⻋的不断发展,所以动⼒源有很多种,但是最主要的动⼒还是来⾃发动机,当然也有电动机驱动的汽⻋,同时还有混合动⼒汽⻋,但是不管是那种动⼒系统,其在上层控制⽅式上都是⼤同⼩异的,但是对于线控技术讲,电动机驱动的新能源汽⻋是
最理想的动⼒系统同时也是未来汽⻋发展的⼀个⼤趋势。 传统的发动机动⼒是通过拉线的机械⽅式来控制节⽓⻔的张合程度,从⽽来控制发动机转速的。随着线控技术的不断发展,现在⼤部分⻋型都采⽤电⼦踏板的⽅式取代了机械的拉线⽅式。判断⼀辆汽⻋是否具备线控动⼒系统最明显的⽅式便是判断该⻋是否采⽤了电⼦式的油⻔踏板。
除了控制速度的油⻔踏板,电控的挡位调节器也是⼀个衡量线控动⼒系统的 重要标志。如果拥有了电控踏板但是不具备电控挡位调节,那么这种⻋型只能说具备了⼀部分线控动⼒,⽽没办法实现全⾯的动⼒控制。其中⻋辆是否为⾃动挡汽⻋是判断该⻋型是否为电控换挡的重要标志(但不是唯⼀标志)。

4.1 线控动⼒系统硬件组成
线控动⼒系统主要由:电⼦油⻔踏板、踏板位移传感器、ECU(电控单元)、伺服电动机和节⽓⻔执⾏机构组成,电驱动汽⻋则没有节⽓⻔执⾏机构和伺服电机,通过ECU处理之后的⽬标速度信息直接传送给MCU。
改造线控动⼒系统的两个关键在于电⼦油⻔踏板的改造和电⼦换挡器的改造,⼀般情况下如果⼀辆汽⻋具备了定速巡航功能,那些就可以说它是具备了⼀定线控动⼒系统了的,⾃动换挡还需要深⼊剖析。
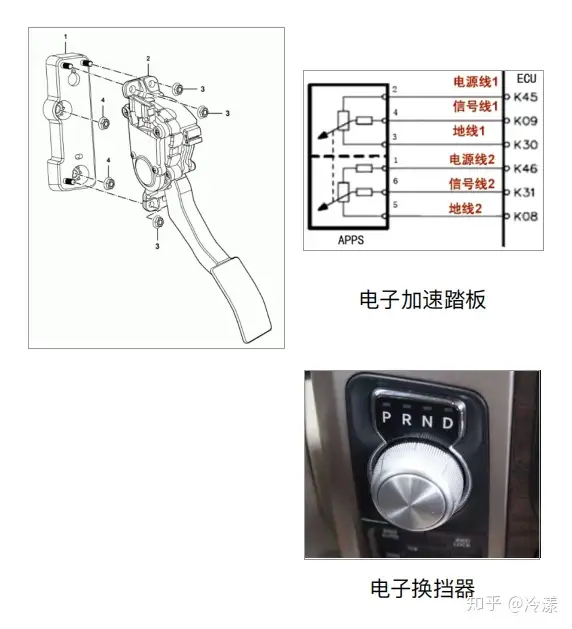
>电控油⻔踏板:电控油⻔踏板主要部件是⼀个位置传感器,位置传感器采集到踏板输⼊值之后传给控制ECU进⾏数据处理。⼀般情况下油⻔踏板传感器是电压信号,随着踩踏⾏程不同会输出不同的电压信号(霍尔效应)。踏板⼀般会有六根线,但是⼀般三根为⼀组,实则为两套互相冗余的传感器系统。
>电控换挡器:电⼦换挡器普遍为多挡位的波动或旋钮开关,开关不同线制也有所不同,旋钮开关旋⾄不同的位置相应的线束会被联通。
4.2 线控动⼒系统硬件组成
>控制油⻔踏板:对于电⼦油⻔踏板来说,由于油⻔踏板本身有⼀个ECU,且这个ECU是不能够重新烧写程序和修改控制代码的,所以⼀般情况下在改装线控动⼒系统的时候都是加装新的ECU在原ECU和油⻔踏板中间。
由于线控动⼒系统的两个控制都是通过传感器信号输⼊来进⾏相应控制的,所以⼀般情况在该⻋型具备了这两种控制⽅式的情况之下,都没有必要去修改太底层的电动机或者发动机的控制⽅式,这部分原⼚会做得更好。
在CAN中MCU会实时的发送处发动机/电动机的当前转速,简单的修改⽅式是掐断油⻔踏板和原⻋控制器的连接,在中间加⼊我们⾃⼰设计的控制器,再通过⾃制的控制器去给原⻋ECU“喂”⼀个我们设定的模拟传感器输出值,并实时监控CAN中的发动机或电机的转速,然后反复调节该值来实现速度的闭环控制。
>控制挡位调节:在控制前进后退的挡位调节上,其实使⽤的⽅式可以和控制速度的⽅式类似,只不过是将”喂”的数据变成相应的开关量。
在线控动⼒系统的改装中,对⻋速的敏感程度是此项修改的关键标准。
后记
线控技术的不断成熟给⾃动驾驶奠定了坚实的基础,现在⼤部分整⻋⼚都在向⾃动驾驶领域涉⾜,同时他们⾃⼰拥有了⾃⼰⻋辆的全部信息,处于种种原因,对于个⼈或者⼩团队来说想拿到他们汽⻋的协议是不可能的事情,因为这部分信息是汽⻋整⻋公司最核⼼也是最重要的⼀部分财产。通过学习线控和改造线控⻋不仅在经济上⼤⼤缩⼩了⾃动驾驶研发成本,同时更重要的是熟悉了汽⻋的每⼀个部件。线控是⾃动驾驶最核⼼的技术之⼀,在开发⾃动驾驶的过程中不能不知道⾃⼰算法下⾯这套硬件的⼯作⽅式和“习性”。