续探讨Bump-steering在乘用车上的解决和平衡。
乘用车设计考虑的因素比赛车要多得多,要考虑成本、疲劳耐久、维修、还要考虑客户买不买账....总之乘用车上的各种问题,很多都不是彻底解决,而都是在找一个平衡。对于转向系统的Bump-steering
也是一样,我们希望彻底解决Bump-Steering,但从力学角度,我们又希望拉杆恰好处于轮心高度,这样疲劳耐久、上下球销受力要好,所以在乘用车上,很少有彻底全行程内解决Bump-steering...并不是没方案,而是有所不为...
在多体动力学软件大力发展之前,用代数方法解算需要很大的工作量。需要每一个轮心位置解算一系列的方程...所以工程师们更愿意用几何近似的方法来找出近似的位置...
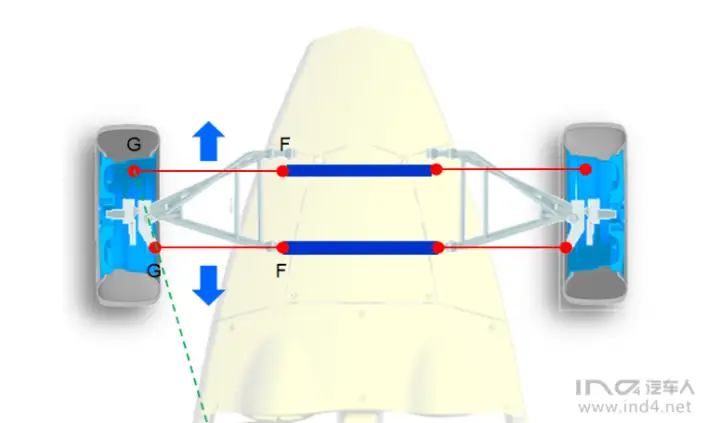
上一节我们了解了,如果将横拉杆布置在A-B或C-D位置,能彻底解决bump-steering, 但乘用车上为了解决力学问题,通常将拉杆布置中间位置,这个时候该如何布置才能更好解决问题。
从悬架瞬心E 出发(关于瞬心可 参考悬架课程第二讲),连接一条线G-E 。
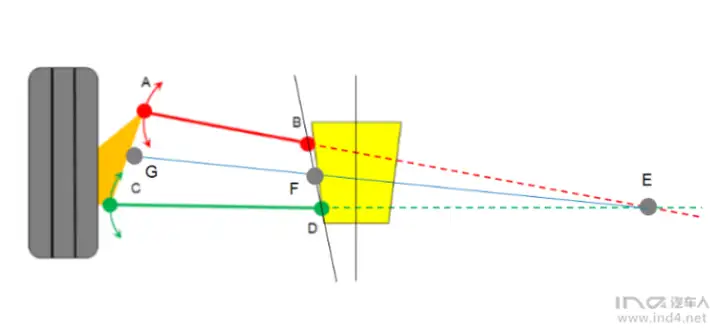
G-E与B-D 的焦点F 就是转向拉杆内点,也就是转向机齿条球销点的位置。
G-F就是转向拉杆...如下图
But
很多人估计疑惑了,
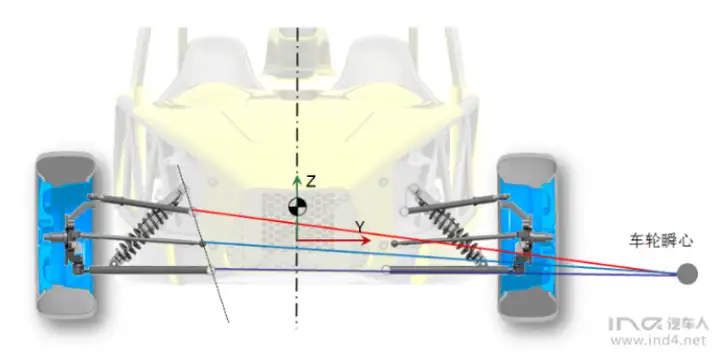
上两图,我们只是从车辆Y-Z投影平面进行了点位的探讨。比如F点,我们相当远只定义了Y-Z坐标,如果从车辆Top_View来看,F点X坐标该如何定?
G点更不用说了,虽然在G-E直线上,但在直线上那个位置?X方向呢?是在轮心前方,还是后方?我们下面接续探讨.上面的讨论,其实我们决定的只是G-E
这条线所在的一个平面,F和G 在平面内还有很大的自由度。如下图。
下面继续探讨F、G点的位置探讨,转向系统除过Bump-steering
的特性之外,还有一个响亮的名词叫Ackermann
angle(这个理论,本节不做解释),简单来说就是转向时外侧车轮转向角小于内侧转向角,可以保证四轮都纯滚动的转向,为了实现这一转向理论的实现,我们需要合理的布置转向拉杆G点的Y方向值..这么来实现呢!
如下图
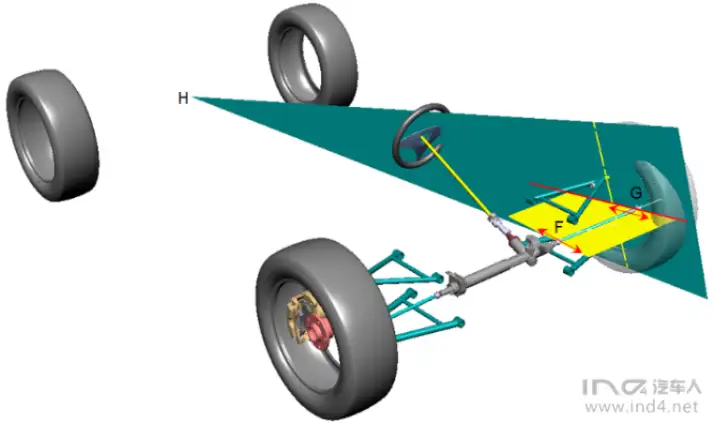
初中几何知识我们都知道,通过直线和直线外一点决定一个平面。在这里我们通过后轴中心点H
和前轮转向主销(关于主销可以参考课程悬架第一讲),创建一个平面(绿色平面)该平面与上述拉杆平面(黄色平面)会产生一个交线(红色),拉杆G点只要落在这条线上对Ackerman
有利。问题又解决了一个。G 点的Y 方向被定义了,现在G点只能在红色交线上移动....
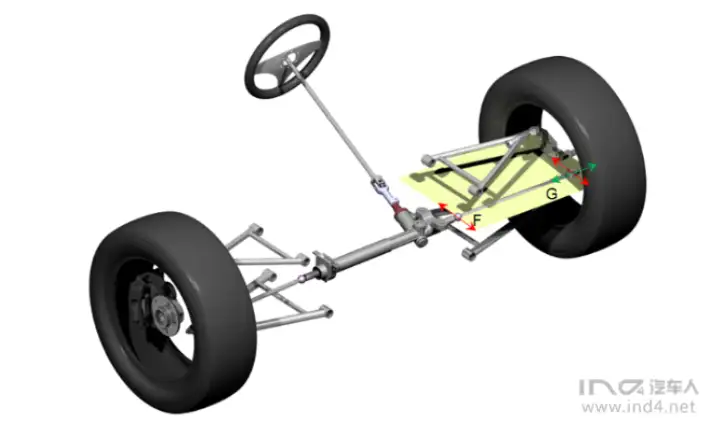
一般的布置上,从Top_View 来看,拉杆内外点处于水平位置(内外点,X 方向坐标相同,但也不绝对),如下图。
外点G的位置可以位于轮心前或者后两个位置,但必须满足落在交线之上.如果你注意观察,可以发现前置拉杆的车辆外点都深入轮辋之内, 而后置拉杆的车辆则外点更靠近车身一些。
从力学角度出发,无论G在轮心前、还是后,我们都希望G点距轮心越远越好。也就是我们所说的转向力臂越大越好,这样可以让拉杆的受力更小,另外从车轮上传递上来的路面反馈也更容易抑制。这个道理很简单,我们开门的时候,离门转轴越远越省力....
具体到布置上,那就是尽量的靠前布置(拉杆前置),或者尽量的靠后布置(拉杆后置)。当然这里最大的障碍便是轮辋的包络(跳动+转向),所以拉杆X方向的布置就只考虑空间关系了。
至此,拉点内,外点的三个方向都有了定义或者限制。我们在做硬点布置的时候就有了依据。




