
Shenzhen Chinadream Motor Technology Co.,Ltd




汽车将逐渐不再只是纯粹的交通工具,而具备更多的电子产品属性。EE 架构的升级使汽车控制器中的软硬件解耦、使软件可以实现OTA、使车载控制器的运算能力与信息传输能力大幅提高,甚至可以采用云计算来增强运算能力,这些变革都为“软件定义汽车”与汽车的高度智能化发展提供了必要的条件,使汽车行业的发展突破了由硬件主导的阶段,软件成为汽车产业链未来的价值核心。从软件代码量对比来看,智能汽车的代码量已经达到1 亿行,远高于PC 的Windows 系统5000 万行,手机安卓系统1300 万行。
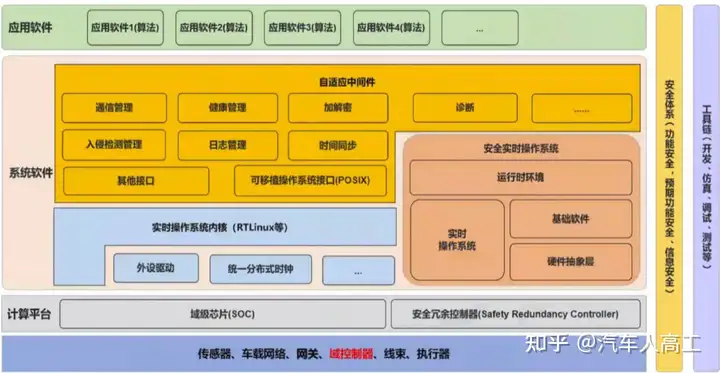
智能汽车软件分为三层结构,包括:
底层系统软件层
包括虚拟机、系统内核、AUTOSAR 等;
应用中间件和开发框架
包括功能软件、SOA 等,位于操作系统、网络和数据库之上,应用软件的下层,为应用软件提供运行与开发的环境,帮助用户灵活、高效地开发和集成复杂的应用软件;
上层应用软件层
包括智能座舱HMI、ADAS/AD 算法、网联算法、云平台等,用于实际实现对于车辆的控制与各种智能化功能。AP AUTOSAR 和中间件OS 将是众多Tier1 的发力重点。
➢ 操作系统:是管理和控制车载硬件与车载软件资源的程序系统,主要包括两种。
1)基础汽车操作系统:
如QNX、Linux、WinCE、Android 等,包含所有的底层组件,如系统内核、底层驱动等,有的还包含虚拟机,具体应用上,目前75%的自动驾驶域控制器的底层操作系统使用的是QNX 系统;2)定制型汽车操作系统:指在基础型操作系统之上进行深度定制化开发(包括系统内核修改),最终实现座舱系统平台或自动驾驶系统平台,百度车载OS,大众VW.OS 属于此类。国内主要的汽车操作系统玩家包括TINNOVE 梧桐车(腾讯系)、斑马智行(阿里系)、国汽智控、百度和华为等,主机厂自身开展OS 研发难度非常大。
➢ 虚拟机(Hypervisor):
一种运行在基础物理服务器和操作系统之间的中间软件层,可允许多个操作系统和应用共享硬件,主要应用在座舱领域。在座舱域控制器中,由于安全要求不同,需要运行不同的操作系统(比如Linux/QNX 负责实时性仪表(ASIL B)、安卓负责信息娱乐系统(ASIL A)以及弱ADAS 功能(ASILC)),通过Hypervisor 技术可以将不同的操作系统运行在同一个主控芯片,实现“一芯多屏”功能。目前常见的虚拟机包括黑莓的QNX、英特尔主导的ACRN、Mobica 为代表的XEN、松下收购的Open Synergy 的COQOS、德国大陆汽车的L4RE,法国 VOSyS 的VOSySmonitor 等。
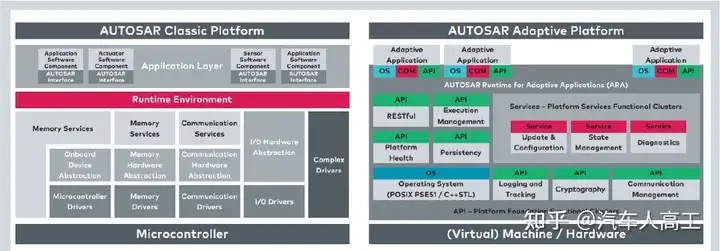
➢ AUTOSAR(Automotive Open System Architecture):
由于车辆功能的复杂性提升,为了解决集成不同供应商组件面临的兼容性问题,2003 年由宝马、大众、博世等6 家企业联合成立AUTOSAR 联盟,旨在实现汽车软件开发的标准化,核心思想是通过软硬件之间插入中间件,软硬件通过接口相互访问,在保证接口不变的情况下,各自内部可以进行调整,解决兼容性问题以及提高软件的复用性。CP AUTOSAR(Classic platform AUTOSAR)是经典标准版本,采用面向信号的软件架构,所有模块都已明确规定,基于C语言开发,只支持静态配置,因此虽然能够较为方便地更新功能,但是功能和硬件之间点对点通信,依旧存在对应关系,难以适应集中式架构要求。AP AUTOSAR(Adaptive platformAUTOSAR)采用SOA 软件架构,除API 之外,更少的模块被明确规定,基于C++开发,使得各个硬件能够向多个软件订阅服务,以执行复杂操作。为此,自适应标准不再使用硬件抽象层,改以功能群组,在功能实现过程中进行动态配置,以实现前述“多对多”的数据通信。软件与硬件的对应关系完全打破,软硬件实现深度解耦。
➢ 中间件:
中间件是位于底层操作系统和上层应用程序之间的软件模块,集成了AUTOSAR 自适应平台和安全通讯模块,直接与操作系统交互,通过最小化接口的方式,保证了与系统所有部分的快速通信,显著降低OEM 系统集成的复杂性。类似EB、Vector、TATA、Mentor、ETAS、KPIT 等传统基础软件平台供应商和TTTech Auto、东软睿驰等后来者都在抢抓中间件市场机遇。对于OEM来说,底层基础软件非常复杂,搭建整建制团队成本过高,一般而言,其软件研发更多集中在上层差异化应用上,而基础软件(AUTOSAR)和中间件交由供应商集成,可更快速实现产品交付。
➢ 上层应用软件:
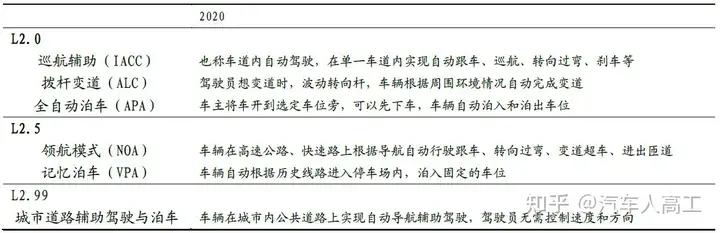
上层的应用软件层是OEM 重点研发打造差异化的领域,比如座舱HMI、自动驾驶等。自动驾驶域控制器上层的应用算法较为复杂,包括场景算法(涵盖数据感知、决策规划、控制执行等)、数据地图、人机交互(HMI)等,其中场景算法最为复杂,典型的包括感知、决策、执行三个维度的算法,进而实现各类场景下的自动驾驶功能,如L2 级自动驾驶的典型功能全自动泊车(APA)、领航辅助等。目前整车厂、传统Tier1、初创企业、科技巨头以及独立的软件企业等在上层软件领域都在积极发力。
汽车软件商业模式:
智能汽车软件的商业模式一般采用“IP+解决方案+服务”的模式,Tier1 软件供应商的收费模式包括:
(1)一次性研发费用投入,购买软件包,比如ADAS/AD 算法包;
(2)单车的软件授权费用(License)、Royalty 收费,按汽车出货量和单价一定比例分成,例如车载音乐、视频软件等;
(3)一次性研发费用和单车 License 打包。
国内的大部分的企业都是按照项目形式或者是一次性NRE 的形式收费,无论是卖多少辆车都按一个价格收费,如中科创达、诚迈科技基于高通等芯片平台提供智能驾驶舱适配性开发。只有细分领域国际头部供应商会采用第三种收费模式,既收取开发费NRE,还根据每一辆车收license 费用。