仔细想往L4的路上的情况,用一页图大概可以看清楚各家的方向,L4的应用,在各个特定的区域通过限定使用限制和解放驾驶者,玩得还是有空间的。
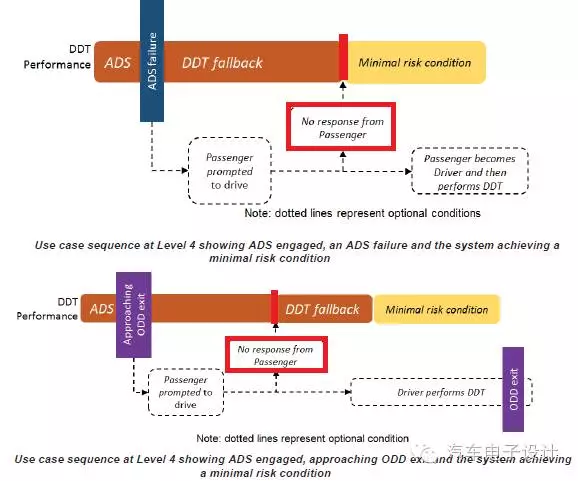
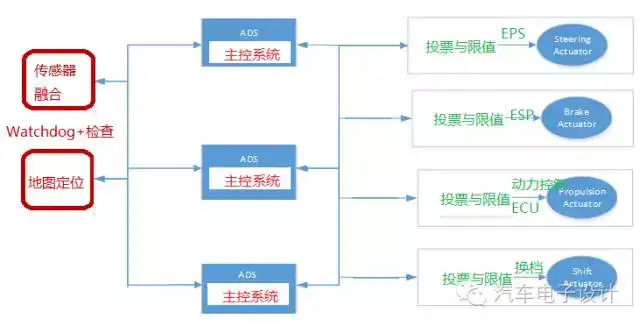
由于有着Fallback的要求
诊断内部ADS系统包括(感知、处理)的故障
通过感知系统,诊断ADS系统的使用边界
诊断整车执行系统的故障
对整个系统而言,需要考虑的内容大概有几点:
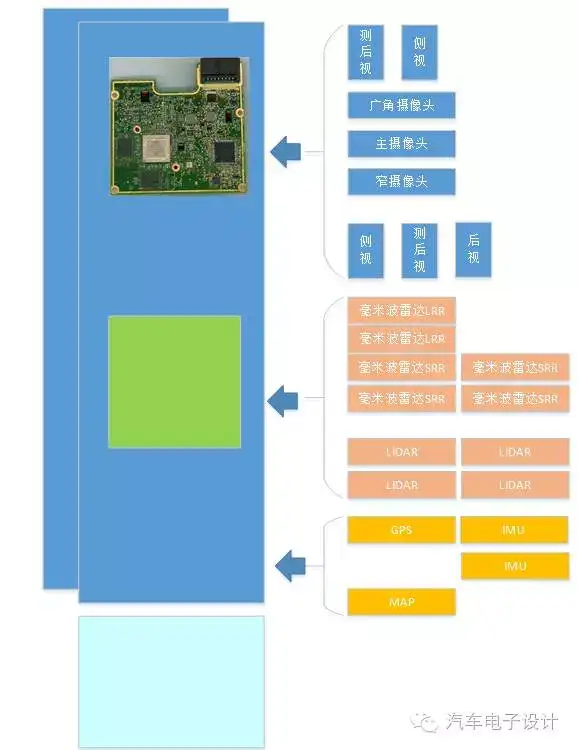
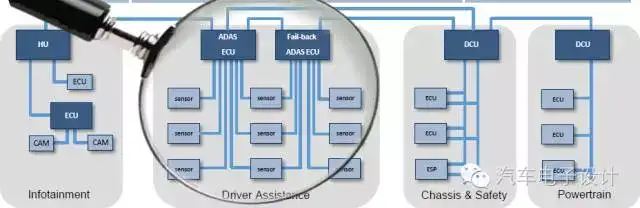
第一 传感器的配置和与处理部分的链接
第一部分输入是各个方向的视觉配置,主要是各家都开始在这里发力着手正常情况下对环境识别性能的主要突破口。
第二部分输入是毫米波雷达矩阵和四周激光雷达,在视觉收到限制条件下,与天气和紧急环境改变下的后备感知手段
第三部分输入是高精度地图和IMU涉及定位部分。
备注:网联这部分,受周围环境较大,可以作为输入的一部分。
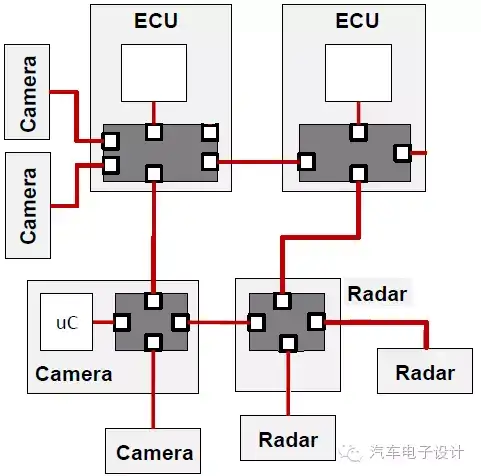
链接需要解决的问题,主要是传感器到不同处理器的输入问题,有两种集中处理的办法
1)分配连接方式,选出后备子集
2)使用以太网把输入和处理链接
参考:Ethernet TSN as Enabling Technology for ADAS and Automated Driving Systems
从目前可以参考的情况来看,
备注:里面还需要异构配置后备的,也需要商榷
到了这里,其实算一算,这个自动驾驶系统ADS对原有的系统有很深刻的影响
A.由于整个感知传感器网络和ADS系统都是12V驱动的,对原有的12V网络需求比较高
B.根据这个计算,保持高速运行的情况下,整个系统的工作功率可能要在500~1000W左右,这基本是原有最大的DCDC功率的25%~50%的需求,当EPS、还有其他HVAC内的鼓风机单元和大灯工作,整个12V网络处于高负荷情况
C.这里对整个12V网络的原有设计造成了重新的思考
D.处理和执行之间的通信模式也需要再考虑
小结:ADS系统对整车的通信、供电、功能设计分配都有挺大的变化,不仅仅是改装出来功能那么简单。仅仅加装一套系统是不够的,对里面的内容变化真的挺大。




