
Shenzhen Chinadream Motor Technology Co.,Ltd




在智能驾驶成为车圈重要谈资的今天,人们对智能驾驶传感器激光雷达可能已经耳熟能详了,但激光雷达涉及到的相关原理和技术却又很少有人能讲清楚。今天就带大家一起来了解一下激光雷达!
一、到底什么是激光雷达
激光雷达(LIDAR)是一种利用激光束探测目标物位置、速度等信息的机械装置,以常见的TOF激光雷达工作流程为例:激光发射器发射脉冲激光束,计时器记录发射时间,接收器接收经物体反射回来的激光束,计时器记录接收时间。根据公式 :
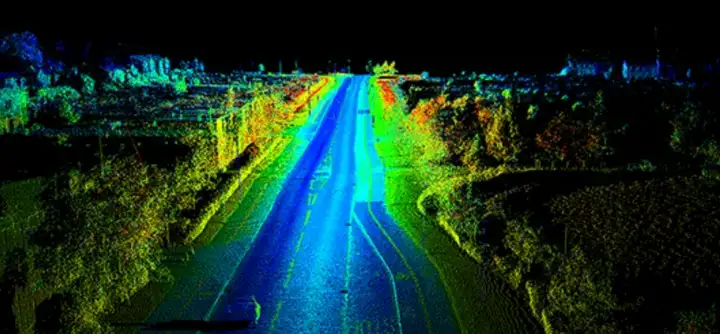
可计算出激光雷达与目标物体之间的距离(其中D为目标物距离,Δt为激光发射接收时间差,c为光速)。利用这一特性,我们可以使用激光雷达来绘制具有深度信息的三维空间图,因此在地质勘探,土木工程,地震学,遥感测绘和大气物理等领域相关工作中,激光雷达已经得到了广泛的应用。
(图片素材来自网络,如有侵权请后台联系)
激光雷达与汽车领域的碰撞得益于自动驾驶技术的发展,标志性事件为2005年的DARPA挑战赛,这次比赛中共有5辆无人驾驶汽车成功通过了212公里的沙漠赛道,其中由斯坦福团队研发的冠军车Stanley(车辆名)所搭载的传感器就包括了5颗用于路面环境感知的单线激光雷达,而其完成比赛仅仅用了不到7个小时的时间,车载激光雷达可以说是一战成名。

“DARPA挑战赛冠军车Stanley”(图片素材来自网络,如有侵权请后台联系)
从此激光雷达在智能驾驶领域就一直处于明星地位,尤其近几年随着自动驾驶技术的快速发展与迭代升级,车辆对外部环境感知的精度要求也越来越高,市场需求也刺激了激光雷达在技术方面与产业化方面的极大发展。激光雷达也由早期技术实验使用的单线激光雷达,进化为现今各种不同规格型号、符合车规级别的多线激光雷达。时至今日激光雷达已逐渐成为自动驾驶感知体系中越来越重要的一环,越高端的汽车越舍得在激光雷达上投入,以提高自动驾驶的应用表现。
二、激光雷达的简单分类
在长期的发展过程中激光雷达衍生出了不同的技术路线,从测距原理上可以分为TOF激光雷达和FMCW激光雷达,两种技术路线又可以在机械结构、扫描方式、波长等维度进一步细分,具体分类如下:
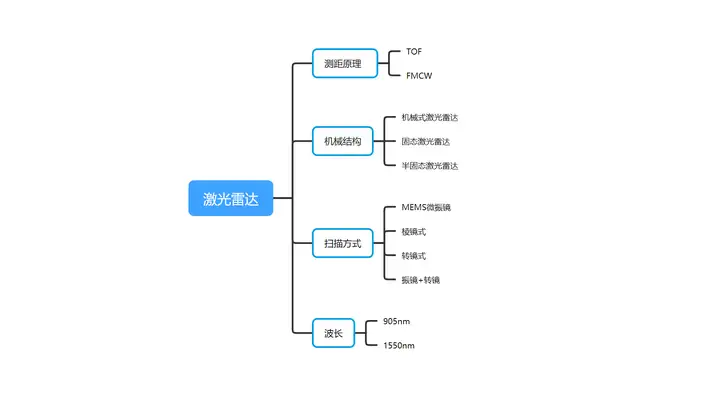
具体到机甲龙,其搭载的等效96线激光雷达采用了905nm波长光源+半固态结构(EEL光源+转镜),两种技术均属于当下成熟技术,在技术性和稳定性方面得到了很好的平衡。性能方面机甲龙搭载的激光雷达可以做到车辆有效检测距离超200米,行人有效检测距离超150米,在高速、城市、泊车等场景提升并保障智能驾驶的性能与安全。
三、雷达激光与其他传感器对比
一辆搭载自动(辅助)驾驶技术的车辆通常包括多种传感器,包括激光雷达、摄像头、毫米波雷达、超声波雷达等,不同的传感器在功能特性方面有不同的特点,将几种传感器进行对比可以得到一个有趣的事实,那就是几种传感器在一定程度上优势互补。
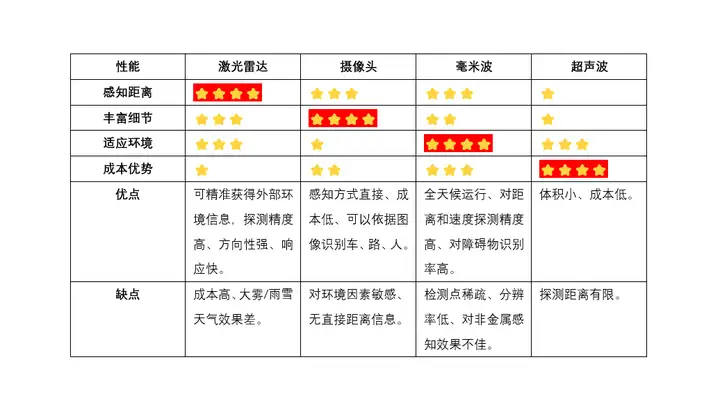
相比于摄像头“稠密感知”获取环境信息的方式而言,激光雷达用的是一种“稀疏感知”点云式的信息获取方式,两者相比类似于“全采样”与“下采样”的区别,而下采样一定程度上存在重要或者关键特征信息遗漏的风险,尤其是目标物较远点云稀疏的情况。为了消弱这种风险,比较直接的方式是增加激光线数(等效线数)。以机甲龙搭载的等效96线激光雷达为例,每秒产生的点云数量可以达到百万级别,密集的点云可以有效减少丢失重要信息的风险,同时作为首搭4激光雷达的车型,机甲龙将这种密集的点云采样从前向120°扩展到了360°全环绕,从而可以全方位的获取环境点云信息。
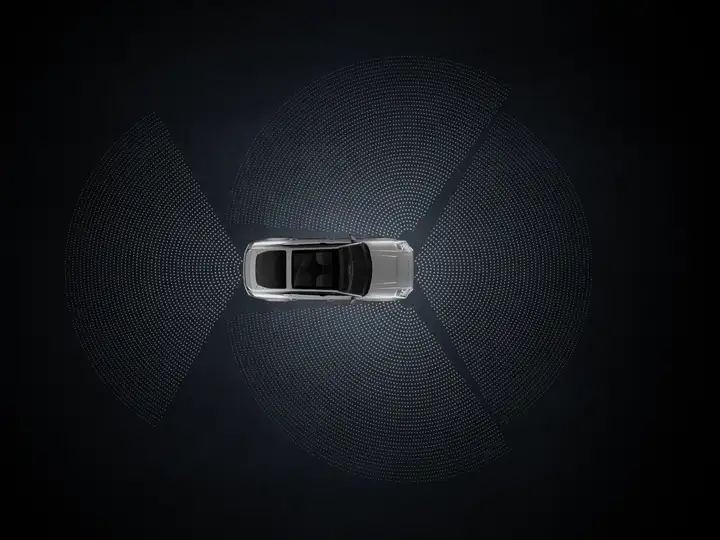
沙龙机甲龙的4激光雷达,实现激光全视角覆盖
为了结合不同传感器的优点,机甲龙的感知系统除了4颗激光雷达之外,还配备了7颗800万像素超高清摄像头、4颗200万像素环视摄像头、5颗高性能毫米波雷达、12颗超声波雷达和1个独立高精度定位单元,其38个智能化感知元件结合高精度地图,打造了5重360°感知覆盖的超智能感知系统,为车辆智能驾驶提供了完备的多维度环境信息,也为安全行车打下可靠基础。
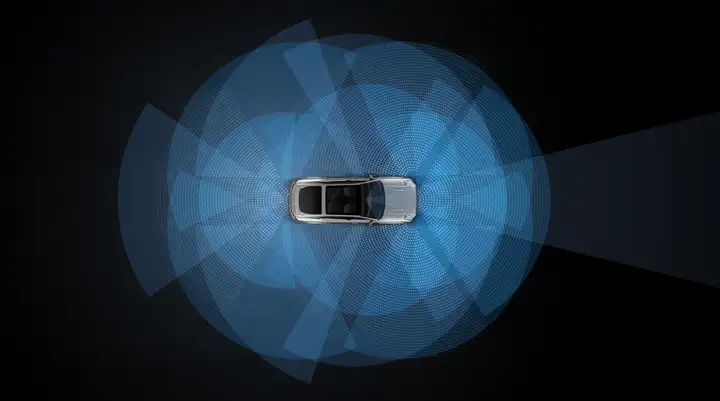
沙龙机甲龙的5重360°超智能感知系统
四、车载激光雷达的发展趋势
当下车载激光雷达行业有以下几个发展趋势:
1、激光线数越来越多
从Stanley最初搭载的单线激光雷达逐渐发展到目前的上百线激光雷达,点云密度和探测距离也随之大幅上升。另外随着技术的不断发展,未来也将会出现千线级别的激光雷达。
2、搭载数量越来越多
早期车辆搭载多台激光雷达,更多是为了弥补点云的稀疏,提高环境感知能力。而目前激光雷达数量的增加则着重于覆盖更广的感知范围,随着机甲龙4激光雷达首次达成360°全方位的覆盖,预计后续会有更多的车辆选择这一应用策略。
3、融入造型的多种探索
在造型融入方面,汽车厂商们都开始了积极探索,从车顶布置到车身布置,从车身布置到机舱盖布置,从固定式到隐藏弹出式,不同的方案各有其优势,都是寻求技术与造型平衡的有益探索。
4、雷达机械结构固态化演进
车辆对于可靠性的极致追求使得激光雷达的结构也在不断发生变化。固态激光雷达由于减少了机械部件,在可靠性方面具有先天优势,车载激光雷达也从早期的机械式发展到如今主流的半固态,更进一步的全固态激光雷达也在不断演进之中。
当前的Navigation Pilot(基于导航的智能辅助驾驶功能)依然以高速、高架场景为主,但站在用户生命周期的OTA和场景释放角度来看,未来智能驾驶系统的核心是在复杂的城市道路交通场景以及高级别泊车场景,相比于高速场景的相对结构化,诸如城市夜晚路口掉头,复杂环岛冲突通行,智能循迹泊出避让等生命周期内要持续进行敏捷开发和软件迭代的场景,无疑需要更强的侧向和后向感知能力。沙龙机甲龙打造的5重360°感知覆盖的超能感知系统,正是为了用户全生命周期内实现从高速到城市到泊车的场景持续释放以及更安全、更智能的用户体验,沙龙将持续关注领域的最新技术进展,为用户带来软硬协同的最佳体验。