严格来说,智能线控底盘是实现汽车高阶自动驾驶(L3级及以上)大范围应用的执行环节核心技术。
普通人理解的高阶自动驾驶是让车可以“像人”一样感知周围环境,思考规划路线,脚踩油门握紧方向盘,可以抽象为感知-决策-执行三个环节,其中智能线控底盘就是执行环节的核心支撑技术。
图1:驾驶过程抽象:感知-决策-执行实际上目前的L4级自动驾驶只能在限定条件下运行,并且在可预见的“弱人工智能”时代,机器都不会自己思考,并在可预见的二十年,没有理论层面的突破,也依然无法实现“强人工智能”,就连人类本身是如何思考的我们都没有弄清楚,更不要说去教机器思考了。但这并不妨碍L4级自动驾驶替代人类完成大部分单调重复的驾驶任务。
进一步看自动驾驶的每一个环节,感知层面,需要多传感器采集数据的融合,采集需要时间、融合需要时间,还会涉及到与其他车辆、基础设施、人的交互需要时间;决策层面,需要多种数据的综合分析、计算、输出命令,这也需要时间;执行层面,信号传递到车辆的纵向控制、横向控制执行需要时间。以上每一个环节时间的减少,控制精度的提高,都有利于道路交通系统的总体安全性。
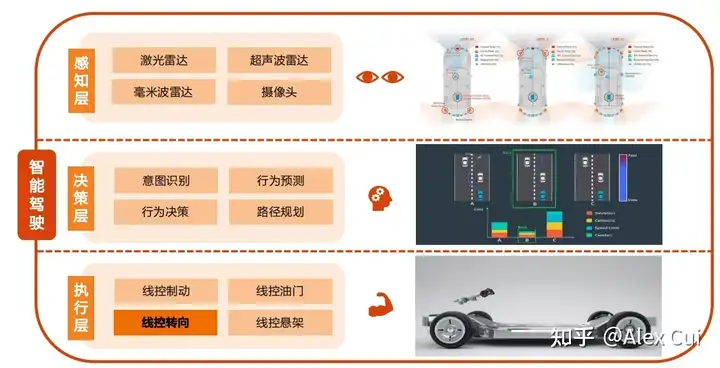
图2:自动驾驶每个环节涉及到的内容
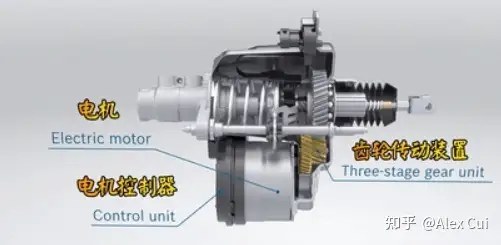
举个例子,线控制动系统,目前普遍采用的是电子液压制动系统(EHB),工作流程可以概括为:脚踩踏板→提供位移信号→电机转动提供助力→最终实现刹车[1],业内装机量最多的博世集团iBooster系统,其制动执行响应时间约120ms。
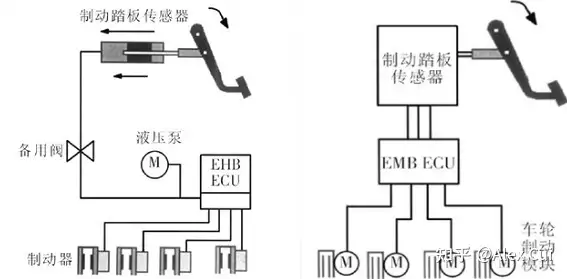
图3:博世集团的iBooster系统构成而比电子液压制动系统(EHB)更先进的就是电子机械制动系统(EMB),EMB进一步取消了液压系统,让制动执行时间更短,可以做到50ms,有效减小制动距离,比目前主流的电子液压制动系统(EHB)技术整整少了0.07秒,如果是高速上时速120km/h的车辆,这0.07秒意味着2.3米的距离。对于城市拥堵环境的跟车,这0.1秒更有利于防止加塞。这对高等级自动驾驶来说,是更优的解决方案。
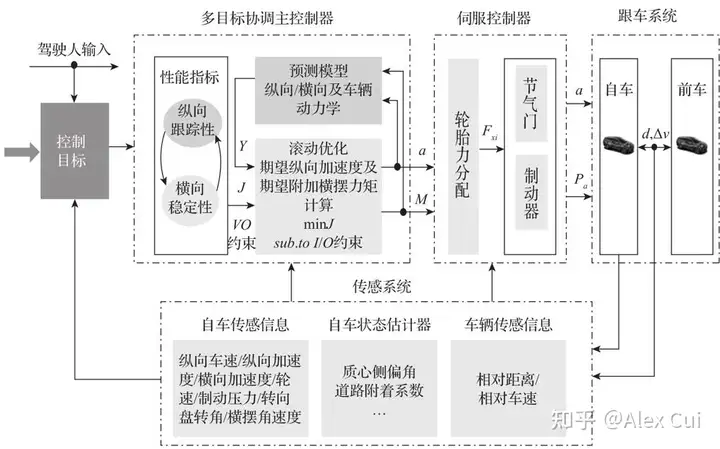
图4:电子液压制动系统(EHB)对比电子机械制动系统(EMB)高阶自动驾驶车辆的控制可以分为纵向运动控制(制动、加速、换挡)与横向运动控制(转向)对应的线控底盘功能是线控转向系统、线控制动系统、线控换挡系统、线控油门系统和线控悬架系统。
车辆是一个强耦合的高度非线性系统,纵横向的控制相互影响,因此还需要纵横向协调控制。描述车辆运动状态的模型,主要分类有运动学模型、动力学模型、轮胎模型、动力模型等等。这里面参数的交互影响相对复杂,线控系统减少机械、液压传动装置,正是在大大降低系统的不确定性,有利于更高安全性的道路交通系统。
线控底盘技术
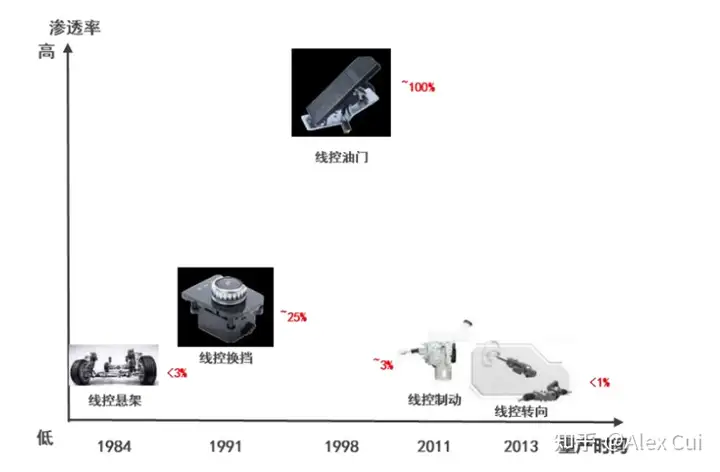
经过多年发展,根据盖世汽车研究院统计数据,截止至 2020 年线控油门由于技术成熟且技术壁垒相对较低,渗透率已接近 100%;线控换挡渗透率约 25%,正处于快速发展阶段;而线控底盘的核心技术— —线控转向、线控制动及线控悬架,其渗透率不及 10%,正处于大规模商业化前夜[2]。高阶自动驾驶作为更强的市场需求,有着很大的牵引作用,将加速线控底盘技术的大规模应用。
图4:线控底盘分系统渗透率