自动泊车当前也成为了汽车发展最热门的技术之一,好多车企发布的新车中也都采用了这项技术,可是已搭载的自动泊车到底属于技术发展的哪那个阶段,或者说现在搭载的自动泊车到底到了何种程度,恐怕好多人的心里还是充满了疑问,这接下来的几篇我们就好好来说一下汽车热门技术——自动泊车。
什么是自动泊车呢
这里采用一下官方的说法,自动泊车就是通过遍布车辆周围的传感器探测车辆周围环境信息和有效泊车空间,并规划泊车路径,控制车辆的转向和加减速,使车辆半自动或自动完成泊车操作的功能。
其实简单说还是无人驾驶那一套,感知、决策、控制,只不过自动泊车限定的车速较低,驾驶场景较为具体,会更容易实现无人驾驶吧。
自动泊车的分级
每一项先进技术的应用都会经历一个较为漫长的发展过程或者说是发展阶段,自动泊车技术也不会例外,我们也是对该项技术的发展做了适合某一阶段的发展路径,也就是做了发展阶段的区分。
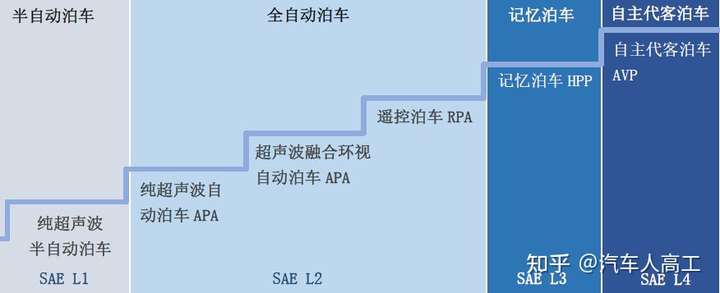
根据自动化程度的演进,自动泊车可分为半自动泊车、全自动泊车、记忆泊车、自主代客泊车四种产品形态,其中,根据搭载传感器和使用场景的不同,全自动泊车又可分为基于超声波的全自动泊车、超声波融合环视摄像头的全自动泊车、遥控泊车三种形态。随着自动泊车技术的不断迭代,自动泊车功能的实用性也越来越强。
自动泊车的发展阶段
下面我们就来一一的介绍。
(一)半自动泊车
半自动泊车(S-APA)基于车辆的超声波传感器实现车位感知,向驾驶员提供车位信息,并进行路径规划,系统自动控制车辆转向系统,驾驶员仅需按照仪表盘的提示对车辆纵向进行控制(控制加速踏板和制动踏板即可)。半自动泊车需要驾驶员实时监督,并控制档位、加速和减速,对应SAE L1 级;对驾驶过程要求较高,且操作流程复杂,用户体验较差。
(二)全自动泊车
与半自动泊车相比,全自动泊车(F-APA)更加智能化。全自动泊车系统可以对车辆进行横向和纵向的控制(就是车辆来控制转向、加速和制动,驾驶员只需监控和特定情况下接管即可),同时需要驾驶员对车辆进行持续监控和有效接管,以保障泊车安全,属于SAE
L2
级别的泊车辅助系统。按照传感器组成的不同,全自动泊车分为基于超声波雷达的全自动泊车、基于超声波与视觉融合的全自动泊车,其中传统超声波泊车方案仅能在由障碍物组成的车位实现泊车功能,应用场景有限,用户满意度不高。而基于超声波与视觉融合的全自动泊车系统有更强的探测物体的能力,可以对车辆周遭环境进行分类,能帮助泊车系统实现更丰富的感知。
两种类型的APA 对比
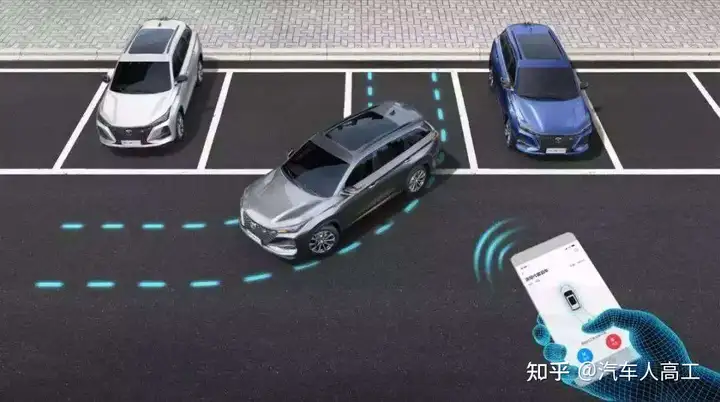
全自动泊车的另一种产品形态是遥控泊车(RPA)。遥控泊车系统在APA 的基础上增加了遥控部分,允许驾驶员在车外一定可视范围内使用遥控装置(手机APP或遥控钥匙)控制车辆实现泊入、泊出、直进、直出等自动召唤或泊车功能,避免了停车后难以打开自车车门的尴尬场景。
全自动泊车所有操作由泊车系统完成,解决了最后十米的自动驾驶问题,用户体验能得到大幅提升。
(三)记忆泊车
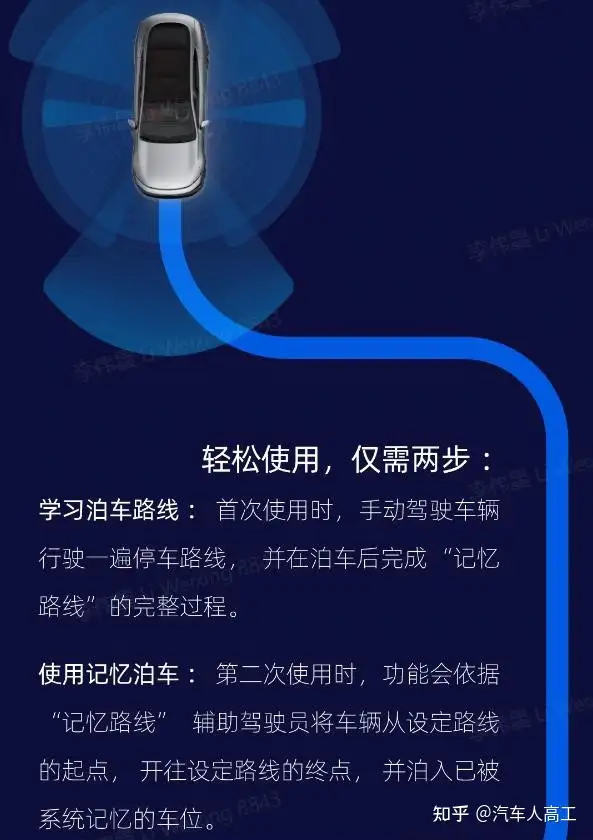
在全自动泊车基础上,记忆泊车(HPP)可在相对更远距离和更复杂环境中自主完成泊入和泊出操作。记忆泊车建立在SLAM(Simultaneous Localization and Mapping,即时定位与地图构建)技术基础之上,利用车身传感器,学习、记录并储存用户常用的下车位置、停车地点及泊车行进路径,建立常用泊车路径的环境特征地图,车辆再次经过该地点时,系统将复现用户的泊车路径来代替驾驶员完成停车场内最后一段距离的低速驾驶和泊车。在外界环境发生较大变化,记忆泊车功能无法实现时,记忆泊车系统将要求驾驶员接管车辆或者返回原来位置,对应SAE
分级的L3 级别。
记忆泊车系统应用区域不需要提前采集高精地图,适用于高频、高重复性的泊车行为,可以有效解决家庭区域私人停车位、园区及办公场景下单位固定停车场的泊车问题。
(四)自主代客泊车
自主代客泊车是指用户在指定下客点下车,通过手机 APP 下达泊车指令,车辆在接收到指令后可自动行驶到停车场的停车位,不需要用户操纵与监控;用户通过手机 APP 下达取车指令,车辆在接收到指令后可以从停车位自动行驶到指定上客点;若多辆车同时收到泊车指令,可实现多车动态的自动等待进入泊车位。车辆自动行驶过程中应能遵守道路交通规则,或停车场运营方所制定的场内交通规则。
自主代客泊车(AVP)显著的特点是车内无人。依靠更精准的感知(需使用高精度地图)、更强大的算力、更先进的自动驾驶算法,自主代客泊车系统可自动完成智慧停车场内的低速自动驾驶、自主避障、智能搜索车位和车辆泊入/泊出,目前业内公认的将最先实现商业化应用的L4 级自动驾驶功能。
下一篇我们来重点讲讲自动泊车具体由哪几部分组成,它是如何实现自动泊车的,以及如何自动的对车辆进行横纵向控制。